 |
|
МЕНЮ
|
Дипломная работа: Аналітичне дослідження кривошипно-шатунного механізма автомобільних двигунів1.2.3 Процес горінняГоріння є складним фізико-хімічним процесом. На більшу частину показників двигуна впливають, однак, не фізико-хімічні особливості процесу горіння, а закономірності тепловиділення і викликаних ним зміни тиску і температури в циліндрі. Ними визначаються енергетичні і економічні показники циклу, статичні і динамічні навантаження на деталі, що оцінюються максимальним тиском циклу і швидкістю наростання тиску при горінні, теплова напруженість деталей. Задовільні показники роботи двигуна забезпечуються при тепловиділенні, що починається за 5 – 150 до в.м.т. і завершується через 45 – 500. Максимальний тиск робочого процесу бензинового двигуна визначається по формулі pz = lpc, де l – ступінь підвищення тиску в процесі горіння. Дійсне значення максимального тиску для карбюраторних двигунів рівне pzд » 0,85 pz. Параметри стану робочого тіла в кінці видимого горіння наведенні в таблиці 3. Таблиця 3
* верхні значення для двигунів з наддувом. 1.2.4 Процес розширенняВ процесі розширення здійснюється основна частина позитивної роботи циклу. Як і для процесу стиску, дійсний процес з змінним показником політропи може бути замінений умовним з середнім показником, який вибирають так, щоб тиски на початку і в кінці процесу були такими ж, як і в дійсному процесі. Параметри стану робочого тіла в кінці розширення наведені в таблиці 4. Таблиця 4
2. Кінематика кривошипно-шатунного механізма При роботі поршневого двигуна в його кривошипно-шатунному механізмі виникають сили, які визначають умови роботи окремих деталей, а також самого двигуна в цілому. Величина і характер зміни цих зусиль можуть бути визначені за допомогою рівнянь кінематики і динаміки кривошипно-шатунного механізма. Ці рівняння дозволяють також визначити точне положення для будь-якого кута повороту колінчастого вала, що дуже важливо для розрахунку процесів сучасних автомобільних і тракторних двигунів. При розгляді кінематики КШМ вважають, що кутова швидкість обертання колінчастого вала w постійна і, відповідно, кут його повороту пропорційний часу t. В деяких автомобільних і тракторних двигунах застосовують кривошипно-шатунний механізм, у якого вісь циліндра не перетинає вісь колінчастого вала, а зміщена відносно неї на деяку відстань. Такий механізм називають дезаксіальним. Дезаксіал також може бути отриманий зміщенням осі поршневого пальця. До переваг дезаксіального КШМ слід віднести: зменшення різниці в тиску поршня на праву і ліву сторони циліндра, що забезпечує більш рівномірне зношування двигуна; менша швидкість поршня біля В.М.Т., завдяки чому покращується процес згорання робочої суміші; при нижньому розміщені газорозподільного вала є можливість зменшити відстань між осями колінчастого і газорозподільного валів, а разом з тим діаметри розподільних шестерень і габарити картера привода. 2.1 Кінематика центрального кривошипно-шатунного механізма Схема центрального КШМ подана на рис.3. Залежність між кутом повороту колінчастого вала і відповідним йому часом є такою
де j – кут повороту колінчастого вала, град; t – час, що відповідає цьому куту, сек; n – число обертів колінчастого вала, об/хв. За вихідне приймаємо таке положення КШМ, при якому поршень знаходиться у верхній мертвій точці (в.м.т.). Вводимо такі позначення: r – радіус кривошипа; l – довжина шатуна; S=2r – хід поршня; s – шлях поршня (переміщення від в.м.т.), що відповідає повороту колінчастого вала на кут j; b – кут відхилення осі шатуна від осі циліндра. 2.1.1 Шлях поршня Визначимо залежність шляху поршня від відповідного кута повороту колінчастого вала. З рис.2 шлях поршня S рівний S = OA – OA1 або S = (r + l) – (r×cosj + l×cosb) = r×(1 - cosj) + l×(1 - cosb) = = r×[(1 - cosj) +
Рис.3 Схема центрального КШМ Ввівши позначення
S=r×[(1-cosj) + З рис.2 слідує,
що BC = r×sinj = l×sinb. Звідси sinb = Так як cosb=1 - В цій формулі значення членів, які включають величину l в степені вище першої, швидко зменшуються. Це дозволяє з достатньою для практики точністю обмежитися першими двома членами розкладу, тобто cosb = 1 – 0,5×l2×sin2j. (3) Тоді вираз для шляху поршня S = r×(1 - cosj) + Так як Після ряду перетворень отримаємо: S= r{(1 + 2.1.2 Швидкість поршня Наближену формулу для визначення швидкості поршня отримаємо, диференціюючи вираз (4) по часу:
Так як V = r×w×(sinj + 0,5×l×sin2j). (5) 2.1.3 Прискорення поршня Формулу для визначення прискорення поршня отримаємо диферент ціюванням виразу (5) по часу j = Звідси j = r×w2×(cosj + l×cos2j). (6) 2.2 Кінематика дезаксіального кривошипно-шатунного механізма Схема
дезаксіального КШМ подана на рис.4. За вихідне приймаємо таке положення КШМ,
при якому кривошип займає вертикальне положення, а поршень знаходиться
практично у в.м.т. Вводимо нові позначення: e – дезаксіал; k = 2.2.1 Шлях поршняЗ рис.4 шлях поршня Sд рівний Sд = O1A – O1A¢,
O1A¢ = O1C + CA¢ = r×cosj + Тоді Sд = r×
Рис.4 Схема дезаксіального КШМ2.2.2 Швидкість поршняФормулу для визначення швидкості поршня отримаємо, диференцію-ючи вираз (7) по часу Vд = = r×w×( 2.2.3 Прискорення поршняФормулу для обчислення прискорення поршня отримаємо диференцію-ванням виразу (8) по часу jд =
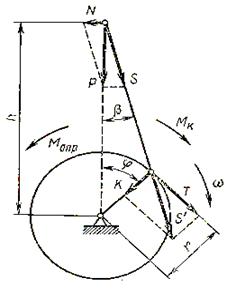
3. Динаміка кривошипно-шатунного механізма 3.1 Сили, що діють в КШМСили, що діють в елементах КШМ двигуна, визначаються в результаті сумісної дії сил тиску газів Pr на поршень і сил інерції рухомих мас Pj. Закон зміни діючих сил в кожному циліндрі багатоциліндрового двигуна теоре-тично однаковий, тому аналіз сумарної дії сил можна провести на схемі сил, що діють в КШМ одноциліндрового двигуна (рис.5). Сумарна сила P, що діє на поршень, рівна P = Pr + Pj (10) Ця сила змінна по величині і напрямку і в залежності від кута повороту колінчастого вала може бути направлена до осі вала, або від неї. Сила Р, що діє по осі циліндра, розкладається на дві складові: силу N, перпендикулярну до осі циліндра і силу S, направлену по осі шатуна. Бокова сила N притискає поршень до лівої або правої частини стінки циліндра і викликає його зношу-вання. Сила S розтягує або стискає шатун і передається на шатунну шийку кривошипа N = P×tgb ; (11) S = P× Якщо перенести силу S по напрямку її дії в центр шатунної шийки S¢, то її можна розкласти на дві складові: тангенціальну силу Т, напрямлену перпендикулярно до радіуса кривошипа, і силу К – по його радіусу. Т = Р× К = Р× Сила Т створює обертовий момент Мкр =
Т×r
= P×r× Одночасно опори двигуна сприймають перекидаючий момент Мпр =
– N×h,
h = r× Перекидаючий момент рівний крутному з оберненим знаком Мпр = – Мкр
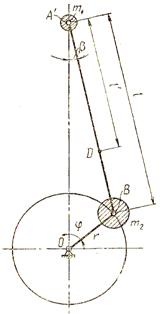
Рис.5 Схема сил, що діють в КШМ одноциліндрового двигуна3.2 Сили інерції КШМСили інерції мас, що здійснюють зворотно-поступальний рух, обчислюються за формулою Pj = – m×j (15) де m – маса чистин, які здійснюють зворотно-поступальний рух. Масу m вважають зосередженою в центрі пальця поршня. Маса частин, які здійснюють зворотно-поступальний рух, рівна m = mп + m1, де mп – маса комплектного поршня, включаючи маси власне поршня, поршневих кілець, поршневого пальця, m1 – частина маси шатуна, приведена до осі поршневого пальця. При динамічному дослідженні двигуна застосовують наближений спосіб визначення сил інерції шатуна, замінюючи на основі законів механіки рух фактичної маси шатуна mш рухом двох або кількох умовних мас. Для отримання системи, яка динамічно заміняє дійсну, необхідно дотриматись таких умов: сума всіх заміняючи мас повинна бути рівна масі шатуна; загальний центр ваги всіх заміняючи мас повинен співпадати з центром ваги шатуна і рухатись за законом руху цього центра ваги; сума моментів інерції всіх заміняючи мас відносно осі, що проходить через центр ваги шатуна, повинна бути рівна моменту інерції шатуна, відносно цієї ж осі; кутове прискорення заміняючої системи в обертовому русі по відношенню до центра ваги повинно бути рівне кутовому прискоренню шатуна в цьому ж русі. Замінимо масу шатуна двома масами m1 і m2 (рис.6). Умови приве-дення, необхідні для отримання системи, еквівалентної в динамічному відношенні системі шатуна, будуть мати вигляд mш = m1 + m2; m1×l¢ = m2×(l - l¢); (17) m1×l¢2 + m2×(l - l¢)2 = Jш. З умов (17) визначимо: m1 = mш× Для визначення мас mш, m1, m2 необхідно знати вагу шатуна, а також положення його центру ваги. Для готового шатуна ці величини визначаються способом зважування. Перше зважуванням визначають повну вагу шатуна Gш = G1 + G2, а потім зважуванням шатуна на двох опорах (рис.7), - різницю DG DG = G1 – G2 . Сумісний розв’язок цих рівнянь дозволяє визначити G1 і G2: G1 = 0,5×(Gш - DG), G2 = Gш – G1. (19) Відстань центру ваги шатуна від осі пальця поршня
Страницы: 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21 |
|||||||||||||||||||||||||||||||
 , (1)
, (1)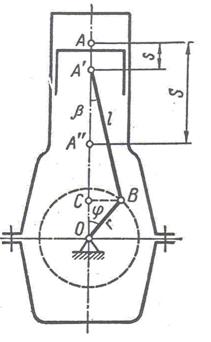
 , то S » r×(1 - cosj) +
, то S » r×(1 - cosj) + 
 = r×w×cosj×
= r×w×cosj×
 .
. - r×
- r× - r×cosj. (7)
- r×cosj. (7)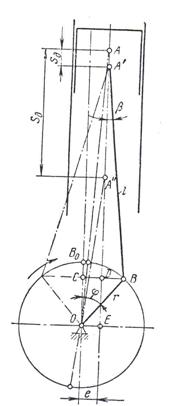
 + r×sinj)×w =
+ r×sinj)×w = + sinj). (8)
+ sinj). (8) = r×w2 *
= r×w2 * (9)
(9) (12)
(12) (13)
(13) (14)
(14)
 .
.
 (20)
(20)
Copyright © 2012 г.
При использовании материалов - ссылка на сайт обязательна.