Курсовая работа: Математическая модель в пространстве состояний линейного стационарного объекта управления
Введем расширенный вектор
состояния  . .
Тогда матрица Z будет иметь следующий вид:  , ,
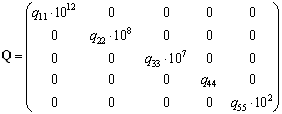
или в численном виде
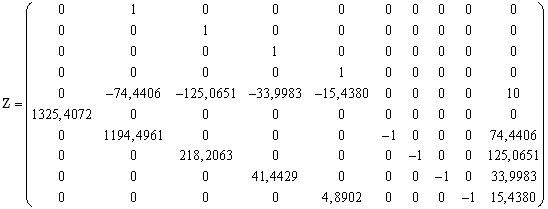 . .
Собственные значения матрицы
 : : 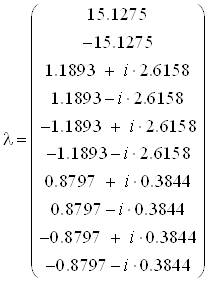 . .
Зная собственные значения
и собственные вектора матрицы Z,
построим матрицу 
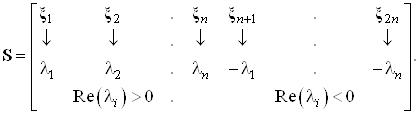
По определению все
решения должны быть устойчивы при любых начальных условиях  , т.е. при , т.е. при  . Чтобы не оперировать
комплексными числами, осуществим следующий переход. Пусть: . Чтобы не оперировать
комплексными числами, осуществим следующий переход. Пусть:
Тогда матрица  формируется следующим
образом: формируется следующим
образом:
 . .
Можно показать, что
матрицу можно получить из прямой матрицы собственных векторов:
 , ,
 . .
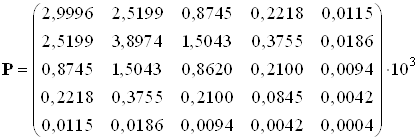
Установившееся решение
уравнения Риккати, полученное с помощью скрипта Solve_Riccati_Method_Diag.m. имеет
вид:
Весовые матрицы  и и  такие же как и в пункте
(5.1.1). такие же как и в пункте
(5.1.1).
Матрицы  тоже аналогичны. тоже аналогичны.
Запишем уравнение Риккати
 . .
Зная, что  , решаем уравнение методом
обратного интегрирования на достаточно большом интервале (примерно 10 с.),
получим установившееся решение с помощью скрипта , решаем уравнение методом
обратного интегрирования на достаточно большом интервале (примерно 10 с.),
получим установившееся решение с помощью скрипта
Solve_Riccati_Method_Revers_Integr.m.:
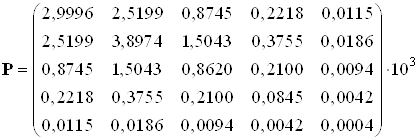
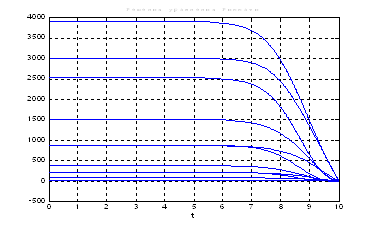
Рис.22. Графики решения уравнения Риккати.
Найдем разницу между
решениями уравнения Риккати в пунктах 5.1.1 и 5.1.2:
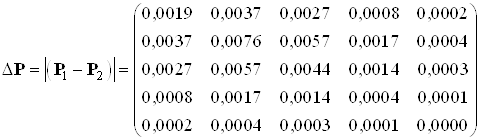
Выводы: сравнивая решения полученные в
пунктах 5.1.1 и 5.1.2 можно сказать, что решения уравнения Риккати первым и
вторым методами совпадают с заданной точностью. Погрешность расхождения решений
невелика.
Используя скрипт AKOR_stabilizaciya_na_polybeskon_interval.m получим коэффициенты регулятора, фазовые координаты системы
и управление.
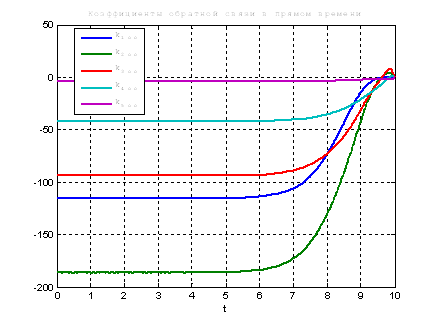
Рис.23. Графики коэффициентов регулятора
обратной связи.

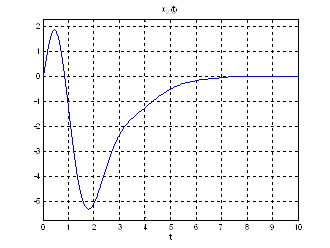
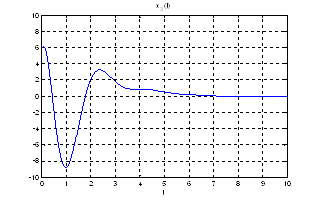 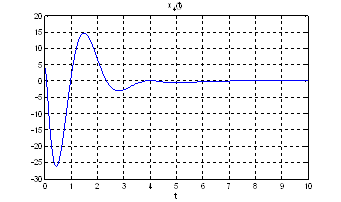
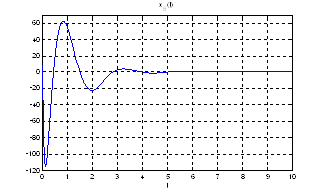
Рис.24. Графики фазовых координат.
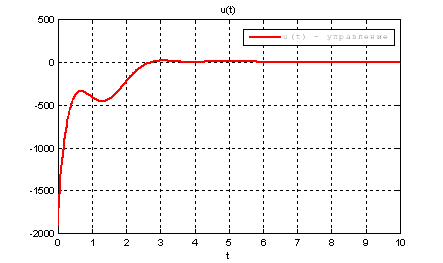
Рис.25. График управления.
Выводы: т.к. решения уравнения Риккати
методом диагонализации и интегрирования в обратном времени дают практически
одинаковый результат, то можно считать, что задача АКОР – стабилизации на
полубесконечном интервале решена с заданной точностью.
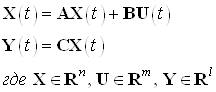
Рассмотрим линейный
объект управления, описываемый системой дифференциальных уравнений в нормальной
форме
Начальные условия для заданной
системы 
Время стабилизации  . .
Необходимо получить закон
управления
минимизирующий функционал вида

Закон оптимального
управления в данной задаче имеет вид

Матричное дифференциальное уравнение
Риккати будет иметь следующий вид:

Если
обозначить  то можно записать то можно записать
Уравнение замкнутой
скорректированной системы примет вид

Матрицы  заданы
в пункте 5.1.1. заданы
в пункте 5.1.1.
Весовые матрицы  и и  имеют следующий вид: имеют следующий вид:
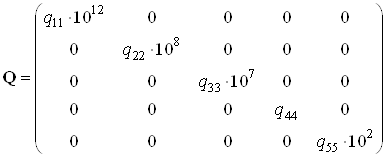 , ,  . .
Используя скрипт AKOR_stabilizaciya_na_konech_interval.m получили следующие результаты:
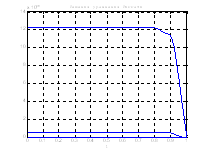
Рис.26. Графики решения уравнения Риккати.

Рис.27. Графики коэффициентов регулятора
обратной связи.
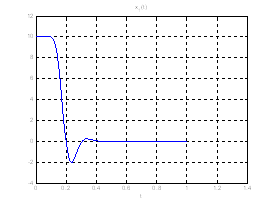 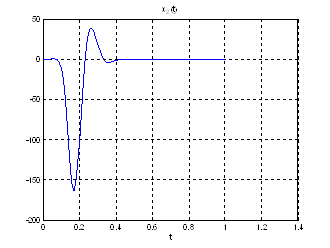 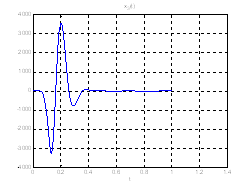 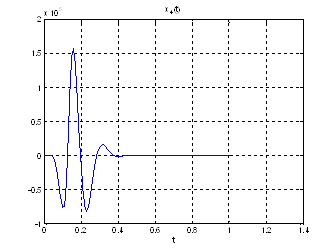
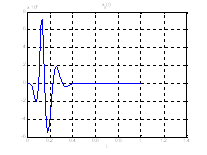
Рис.28. Графики фазовых координат.
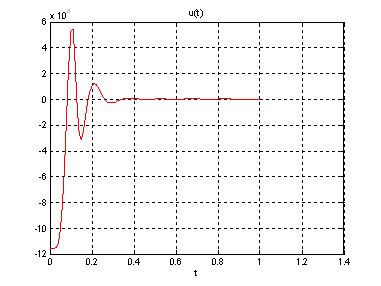
Рис.29. График управления.
Сравним, как стабилизируется
система управления с постоянными и переменными коэффициентами регулятора
обратной связи на начальном этапе:
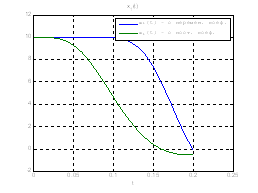 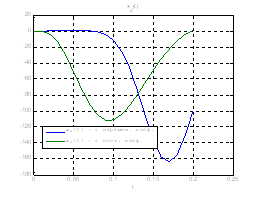
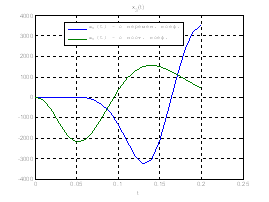 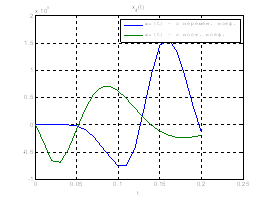

Рис.30. Графики фазовых координат.
Выводы: из графиков видно, что система, у
которой коэффициенты регулятора меняются со временем, стабилизируется не хуже,
чем, система, у которой коэффициенты регулятора не изменяются.
Рассмотрим систему вида
 , ,
где  – возмущающее
воздействие. – возмущающее
воздействие.
Матрицы  заданы в пункте 5.1.1. заданы в пункте 5.1.1.
Весовые матрицы  и и  имеют следующий вид: имеют следующий вид:
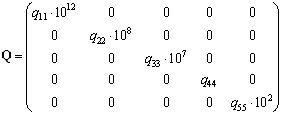 , ,  . .
Начальные условия для заданной
системы  . .
Время стабилизации  . .
Задаем возмущающее
воздействие только на первую координату, так как только она имеет значение
 и и  . .
Решение задачи
стабилизации сводится к решению уравнения Риккати

с начальными условиями: 
Введём вспомогательную
вектор-функцию  , ДУ которой имеет
вид: , ДУ которой имеет
вид:

с начальными условиями:  . .
Управление определяется
по формуле:
 . .
Используя скрипт AKOR_stabilizaciya_pri_vozmusheniyah.m, получили следующие результаты:
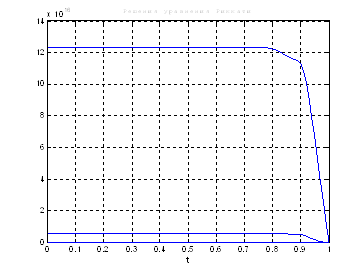
Рис.31. Графики решения уравнения Риккати.
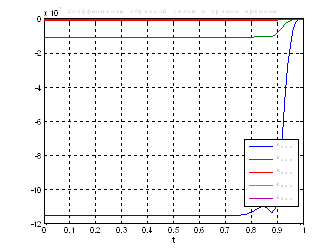 
Рис.32. Графики коэффициентов регулятора
обратной и прямой связи.
Рис.33. График возмущающего воздействия.
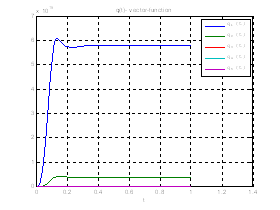
Рис.34. График вспомогательной вектор –
функции.
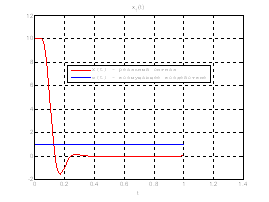
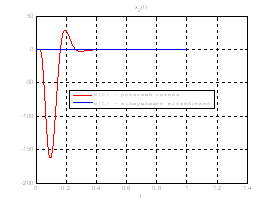
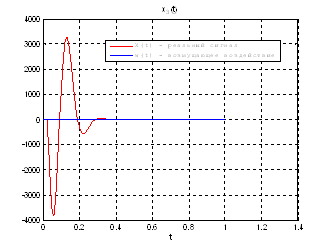
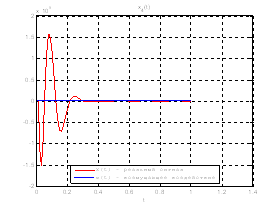
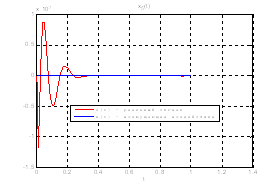
Рис.35. Графики фазовых координат.
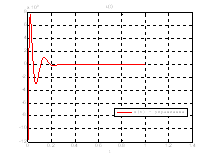
Рис.36. График управления.
Рис.37. График возмущающего воздействия.
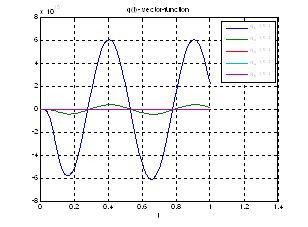
Рис.38. График вспомогательной вектор –
функции.
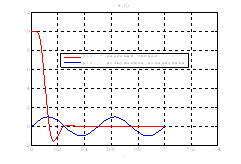
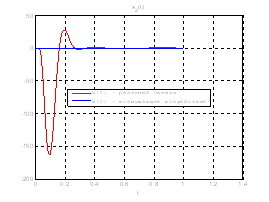
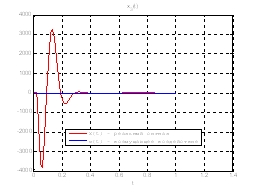 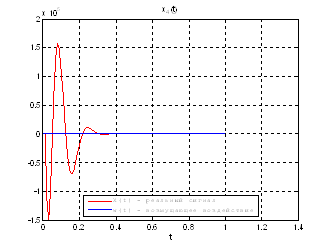
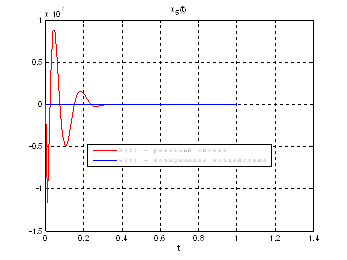
Рис.39. Графики фазовых координат.
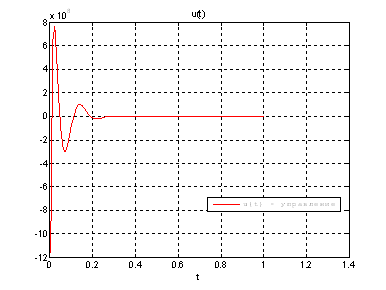
Рис.40. График управления.
Выводы: По графикам фазовых координат при
различных воздействиях видно, что влияние возмущающего воздействия не
существенно и фазовые координаты устанавливаются в ноль. При этом видно, что
графики первой фазовой координаты при различных воздействиях мало отличаются
друг от друга, т.е. система отрабатывает любое возмущение.
Система задана в виде:
Матрицы  заданы в пункте 5.1.1. заданы в пункте 5.1.1.
Весовые матрицы  и и  имеют следующий вид: имеют следующий вид:
 , ,  . .
Начальные условия для заданной
системы  . .
Время слежения  . .
Задающее воздействие в
виде системы ДУ
Начальные условия для
воздействия:
 . .
Введем расширенный вектор
состояния и расширенные матрицы 
 , ,
 , ,
 . .
Тогда новое описание
системы имеет вид:

с начальными условиями:  . .
Решением уравнения
Риккати будет матрица:
с н.у.
Тогда оптимальное
управление, находится по формуле:

Используя скрипт AKOR_slegenie_na_konech_interval_I_podxod, получили следующие результаты:
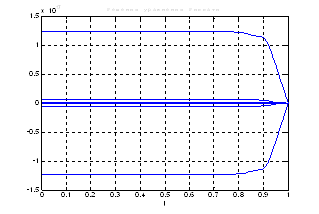
Рис.41. Графики решения уравнения Риккати.
 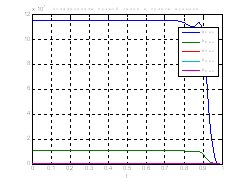
Рис.42. Графики коэффициентов регулятора
обратной и прямой связи.
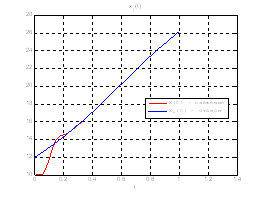 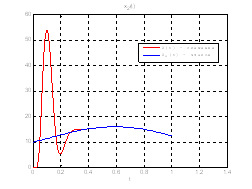
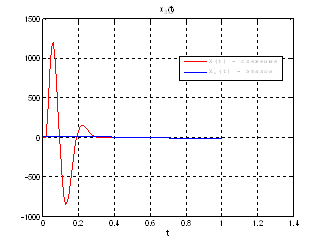 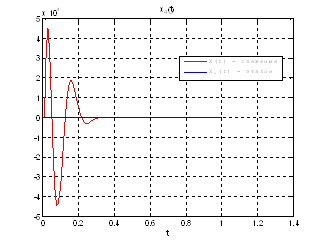
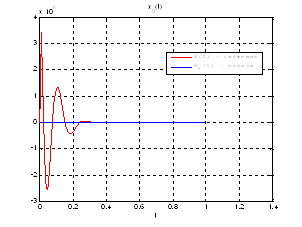
Рис.43. Графики фазовых координат.
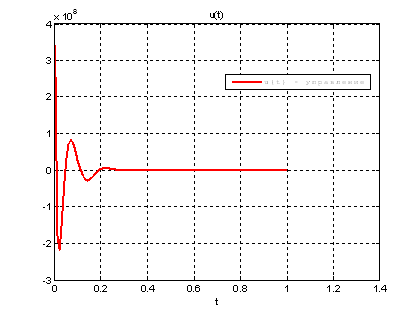
Рис.44. График управления.
Выводы: На данном этапе была решена
задача АКОР-слежения. В качестве отслеживаемого воздействия была взята исходная
система, но с другими начальными условиями, поэтому графики фазовых координат
отличаются от заданных, но только на начальном участке движения.
Система задана в виде:
Матрицы  заданы в пункте 5.1.1. заданы в пункте 5.1.1.
Весовые матрицы  и и  имеют следующий вид: имеют следующий вид:
 , ,  . .
Начальные условия для заданной
системы  . .
Задающее воздействие
имеет вид:
 , ,  . .
Время слежения 
Введём вспомогательную
вектор-функцию  , ДУ которой
определяется , ДУ которой
определяется 
 , ,
 , ,
НУ определяются из
соотношения

Зная закон изменения  и и  , можно определить
управление: , можно определить
управление:
 . .
Используя скрипт AKOR_slegenie_na_konech_interval_II_podxod, получили следующие результаты:
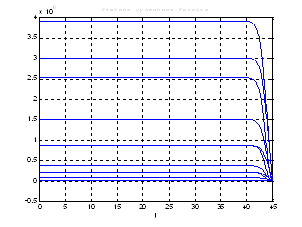
Рис.45. Графики решения уравнения Риккати.
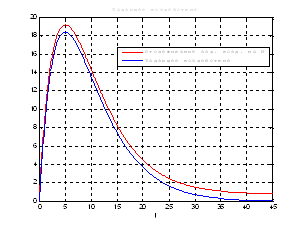
Рис.46. График задающего воздействия.
Рис.47. Графики коэффициентов регулятора
обратной и прямой связи.
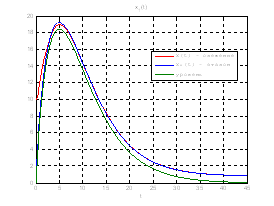 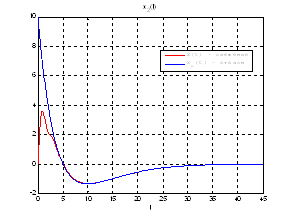
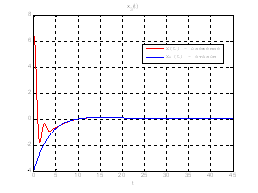 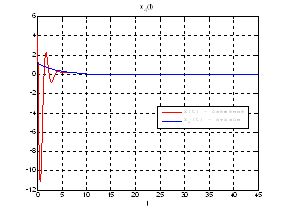
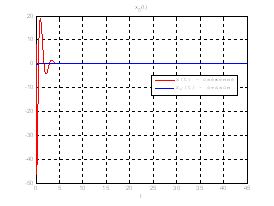
Рис.48. Графики фазовых координат.

Рис.49. График управления.
Выводы: На данном этапе была решена
задача построения линейного сервомеханизма. В качестве отслеживаемого
воздействия была задана экспоненциальная функция. Анализируя выше приведенные
графики, можно сказать, что все состояния заданной системы, особенно первая
фазовая координата, отслеживается с заданной точностью.
Пусть интервал времени  является объединением
нескольких отрезков. Известно некоторое задающее воздействие является объединением
нескольких отрезков. Известно некоторое задающее воздействие  заданное аналитическим
выражением, причем информация о задающем сигнале на следующем отрезке времени
поступает только в конце предыдущего. Таким образом, зная задающий сигнал
только на одном отрезке времени, мы будем синтезировать управление на этом
отрезке. заданное аналитическим
выражением, причем информация о задающем сигнале на следующем отрезке времени
поступает только в конце предыдущего. Таким образом, зная задающий сигнал
только на одном отрезке времени, мы будем синтезировать управление на этом
отрезке.
Разобьем весь интервал на
3 равных отрезка.
Данная задача похожа на
задачу отслеживания известного задающего воздействия, заданного аналитическим
выражением, но с некоторыми изменениями:
1. Поскольку в уравнение Риккати
относительно матрицы  входят только
параметры системы и функционала качества, то решать его будем один раз на
первом отрезке, так как на остальных отрезках решение будет иметь тот же вид, но
будет смещено по времени: входят только
параметры системы и функционала качества, то решать его будем один раз на
первом отрезке, так как на остальных отрезках решение будет иметь тот же вид, но
будет смещено по времени:

 
Страницы: 1, 2, 3, 4, 5, 6, 7, 8
|
