 |
|
МЕНЮ
|
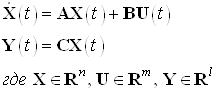
Курсовая работа: Математическая модель в пространстве состояний линейного стационарного объекта управленияТогда уравнения (11) примут вид
Введем остаточные переменные в ограничения на управление
При объединении выражений
(12) и (13) получаем Начальный допустимый базис состоит из остаточных и остаточных искусственных переменных
Формируем целевую функцию (по второму методу выбора начального допустимого базиса)
б) Решение задачи быстродействия Предположим, что При этом Общее число столбцов в
симплекс-таблице: Число базисных переменных:
Сформируем
Выразим из уравнения (12)
начальные базисные переменные
и подставим в целевую
функцию. Получим Решаем задачу (12) – (14) симплекс-методом. В случае, если иначе 1) если 2) если Решения данной задачи
получено с помощью пакета Matlab
7.4 (скрипт SimplexMetod2.m):
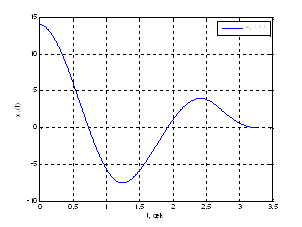
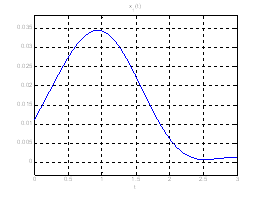
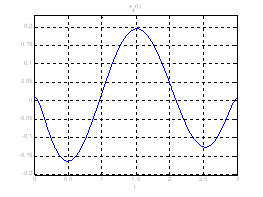
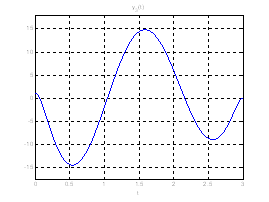
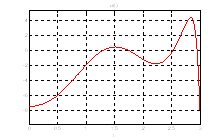
Рис. 14. График фазовой координаты
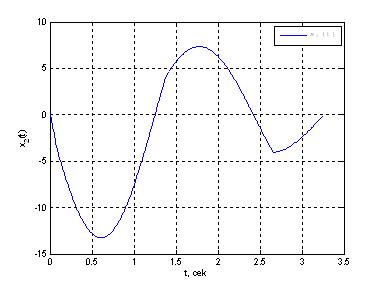
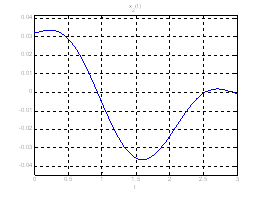
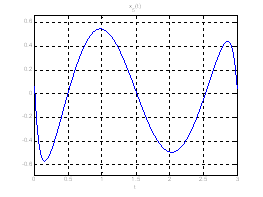
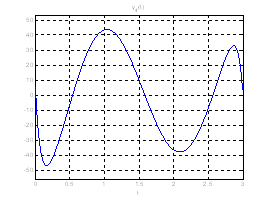
Рис. 15. График фазовой координаты
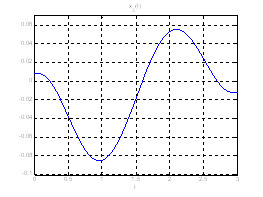
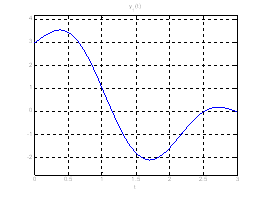
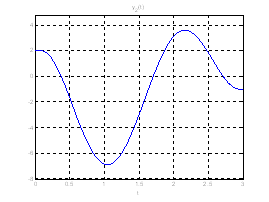
Рис. 16. График
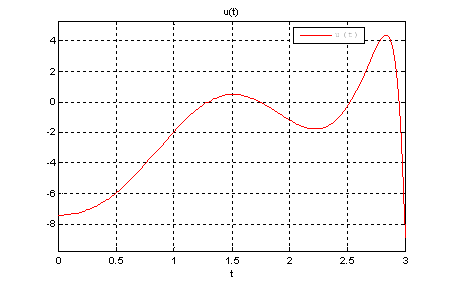
Рис. 17. График оптимального управления Выводы: Сравнивая полученные результаты с
результатами полученными в ДЗ№2 по СУЛА, можно сделать вывод, что решения
совпадают, с точностью до 3. Оптимальная L – проблема моментов 3.1 Оптимальная L – проблема моментов в пространстве «вход-выход»Укороченная система данного объекта имеет вид:
где:
Полюса укороченной передаточной функции:
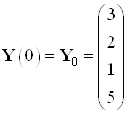
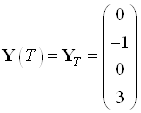
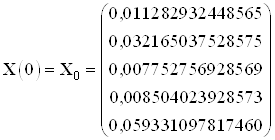
Заданы начальные и конечные условия:
Для
определения начальных и конечных условий для
Где
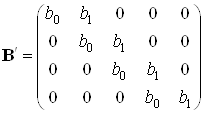
матрица
где ИПФ укороченной системы:
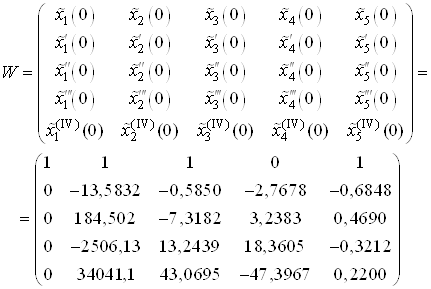
Составим фундаментальную систему решений: ФСР: Составим матрицу
Тогда
Составим моментные уравнения (связь между входом и выходом):
Моментные функции определяются по следующей формуле
Составим моментные функции:
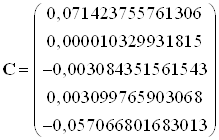
Найдем моменты по следующей формуле:
Числовое значение найденных моментов:
Составим функционал качества, который имеет следующий вид:
при условии, что : Выразим из данного
условия
Подставляя полученное
равенство в функционал и заменяя
Найдем частные производные
Т.о. имеем:
Минимальная энергия:
Найдем управление по следующей формуле:
Тогда оптимальное управление
3.2 Оптимальная L – проблема моментов в пространстве состоянийСистема задана в виде:
Решение ДУ имеет вид:
Составим моментные уравнения:
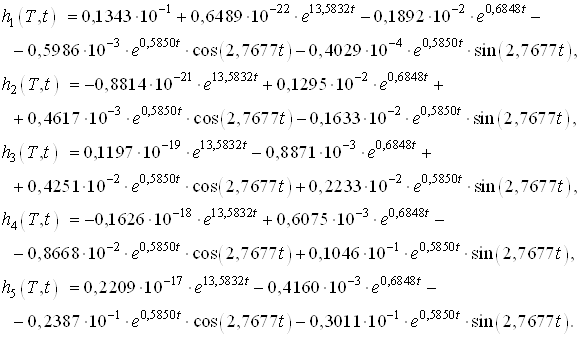
Подставляя необходимые данные в выше приведенные формулы, получим следующие моменты и моментные функции: Числовое значение найденных моментов:
Моментные функции:
Заметим, что моменты и моментные функции совпадают с моментами и моментными функциями, найденными в пункте (а). Из этого следует,
что функционал, значения Оптимальное управление имеет вид:
Проверим правильность полученного решения. Эталонные значения координат в начальный и конечный момент времени:
Найденные значения координат в начальный и конечный момент времени:
Вычислим погрешность полученных результатов:
Ниже представлены графики полученного решения с помощью скрипта Optimal_L_problem_moments.m.
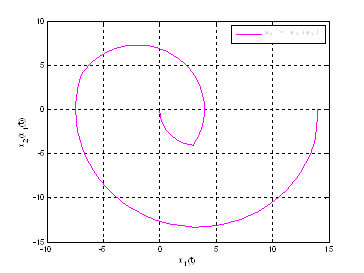
Рис. 18. Графики фазовых координат системы при переходе из
Рис. 19. Графики выходных координат системы при переходе из
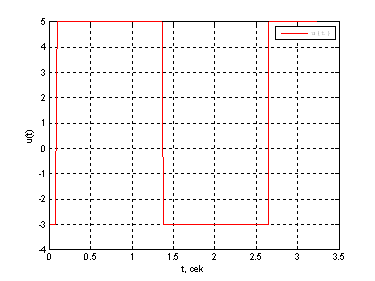
Рис.20. График оптимального управления Выводы: Задача перевода системы из начальной точки в конечную с помощью L-проблемы моментов в пространстве состояний и в пространстве вход-выход была решена с точностью до 12-го знака после запятой. Результаты, полученные при переводе системы из начальной точки в конечную, полностью совпадают. 4. Нахождение оптимального управления с использованием грамиана управляемости (критерий – минимизация энергии) Система имеет вид:
с начальными условиями:
Составим матрицу управляемости и проверим управляемость системы:
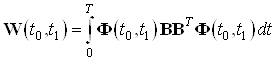
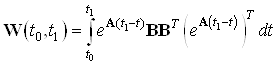
Составим грамиан управляемости для данной системы:
Найдем грамиан по формуле:
Тогда управление имеет вид:
или
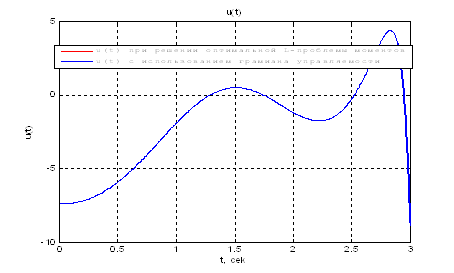
Ниже представлен график оптимального управления полученного с помощью скрипта Gramian_Uprav.m.:
Рис.21. График оптимального управления Графики фазовых координат аналогичны, как и в оптимальной L – проблеме моментов. Сравним управление, полученное в начальной и конечной точках в пунктах 3 и 4 соответственно:
Выводы: Как видно, значения граничных управлений совпадают. А это значит, что задача перевода объекта из начального состояния в конечное решена с высокой степенью точности и с минимальной энергией. Графическое сравнение оптимальных управлений из пунктов 3 и 4:
Рис.21. Сравнение графиков оптимального
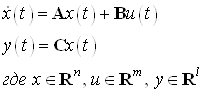
управления 5. Аналитическое конструирование оптимальных регуляторов (АКОР)5.1 Стабилизации объекта управления на полубесконечном интервале времениРассмотрим линейный объект управления, описываемый системой дифференциальных уравнений в нормальной форме
Необходимо получить закон управления
минимизирующий функционал вида
Начальные условия для заданной
системы Моменты времени
матрица
Матричное дифференциальное уравнение Риккати имеет вид:
Если линейная стационарная
система является полностью управляемой и наблюдаемой, то решение
уравнения Риккати при
В рассматриваемом случае
весовые матрицы Оптимальное значение функционала равно
и является квадратичной функцией от начальных значений отклонения вектора состояния. Таким образом, получаем,
что при
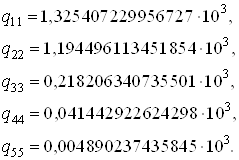
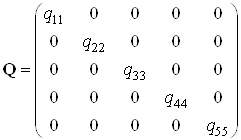
где 5.1.1. Решение алгебраического уравнения Риккати методом диагонализации Для решения данной задачи
найдем весовые матрицы Выберем произвольно
Взяв значения
Матрицы системы имеют вид:
Страницы: 1, 2, 3, 4, 5, 6, 7, 8 |
 (12)
(12) (13)
(13) (14)
(14)

 (15)
(15)
 ,
, ,
,  ,
,  ,
, .
.
 ,
, .
.
 .
.

 , т.е.
, т.е.  .
.
 и приравняем их к нулю.
Решая полученную систему уравнений, определяем оптимальные значения
коэффициентов
и приравняем их к нулю.
Решая полученную систему уравнений, определяем оптимальные значения
коэффициентов  .
.
 .
.
 , при
, при  .
.


 ,
, 
 ,
, 
 ,
, 
 ,
, 
 ,
, 
 ,
, 
 ,
, 



 и
и 



 ,
,
Copyright © 2012 г.
При использовании материалов - ссылка на сайт обязательна.