 |
|
МЕНЮ
|
Курсовая работа: Синтез керуючих автоматівТабл. 3.7 – Таблиця вхідних сигналів автомата з природною адресацією команд
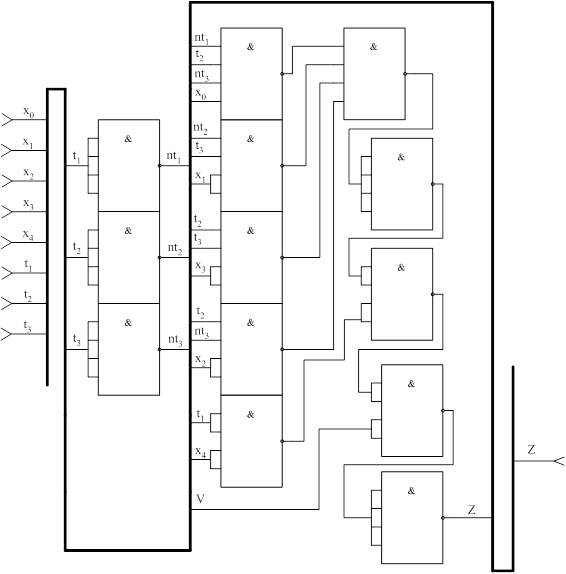
Рівняння вихідних сигналів та їх синтез у заданий базис:
Синтез мультиплексора Табл. 3.8 – Карта Карно до мультиплексора
4. ПОРІВНЯЛЬНА ХАРАКТЕРИСТИКА АВТОМАТІВ
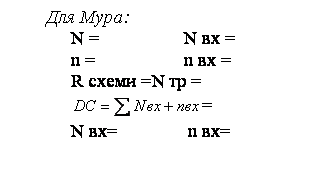
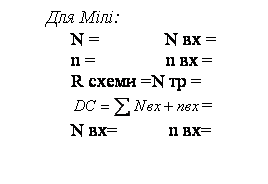
4.1 Порівняльна характеристика автоматів з жорсткою логікою Розрахуємо усі дані по формулам:
N - кількість великих елементів. Nвх – кількість входів на великі елементи. n – кількість малих елементів. nвх - кількість входів на малі елементи. Nтр – кількість тригерів у схемі
Табл. 4.1 – Таблиця обліку апаратурних витрат автоматів з жорсткою логікою
З таблиці 4.1 видно, що R схеми у Мура менше, але входів на DC більше. Тригерів однакова кількість. 4.2 Порівняльна характеристика автоматів з програмованою логікою
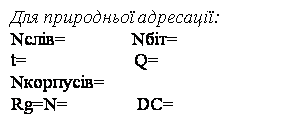
Табл.4.2 Таблиця обліку апаратурних витрат автоматів з програмованою логікою
У автомата з природною адресацією МК більш мінімальні апаратні витрати (корпусів), ніж у автомата з примусовою адресацією. Тригерів однакова кількість. Кількість входів на DC однакова. Комбінаційна
частина у АПЛ з природною адресацією більша, ВИСНОВОК операційний керуючий автомат програмований логіка Виконано курсовий проект з дисципліни „Прикладна теорія цифрових автоматів” на тему „Синтез керуючих автоматів”. Були синтезовані основні типи автоматів з жорсткою та програмованою логікою. Хоча всі приведені автомати справилися з поставленою задачею і в достатній мірі реалізували схему керуючого автомата, але є деякі позитивні і негативні особливості синтезу кожного з автоматів. Наприклад, автомати з жорсткою логікою мають досить велику комбінаційну частину, але вони не потребують елементів ROM, це робить ці автомати дуже оптимальними за ціною затрат. Автомати з програмованою логікою виявились досить складними в розрахунках і реалізації, але це повністю компенсувалось універсальністю та гнучкістю програмування, чого не можна було досягнути на автоматах з жорсткою логікою. |


Страницы: 1, 2, 3, 4, 5, 6, 7, 8, 9