 |
|
МЕНЮ
|
Курсовая работа: Синтез керуючих автоматівКурсовая работа: Синтез керуючих автоматівВСТУП Принцип мікропрограмного керування припускає, що цифровий пристрій складається з двох частин: операційний автомат (ОА) і керуючий автомат (КА). ОА виконує найпростіші операції (мікрооперації) типу зсув, алгебраїчне додавання, кон’юнкція, диз’юнкція і т.п. КА формує послідовність керуючих символів в ОА, під впливом яких ОА реалізує більш складні алгоритми. Такі послідовності операцій називаються мікропрограмами та, звичайно, записуються у вигляді граф-схеми алгоритму. КА розділяються на дві великі групи: автомати з жорсткою логікою та автомати з програмованою логікою. У свою чергу автомати з жорсткою логікою підрозділяються на автомати, виконані за схемою Мілі (КА Мілі) і за схемою Мура (КА Мура), автомати з програмованою логікою – на автомати з примусовою адресацією та з природною адресацією. В автоматах з жорсткою логікою схема автомата однозначно інтерпретує граф-схему мікропрограми. В автоматах із програмованою логікою граф-схема інтерпретується у вигляді програми, що зберігається в пам’яті автомата. 1. СИНТЕЗ ОПЕРАЦІЙНОГО АВТОМАТА 1.1 Аналіз вхідних даних
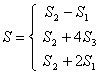
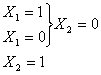
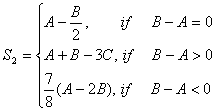
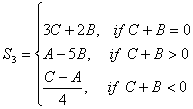
Загальна формула для обчислювання результату S має такий вигляд:
Формулі
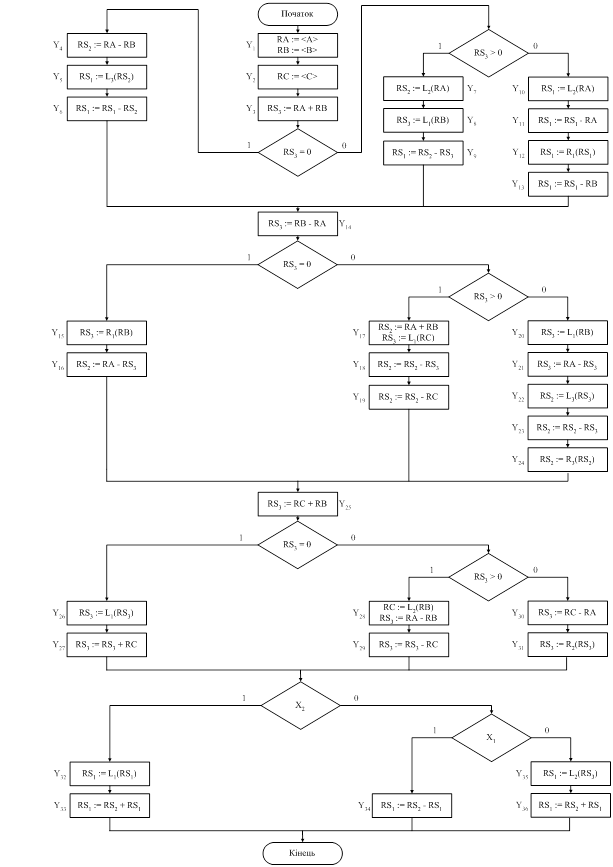
Загальний алгоритм для обчислювання формули S приведений на рисунку 1.1. Для обчислювання формули S використовується ІМp-модель (Individual Mutual with Parallel part - IMp).
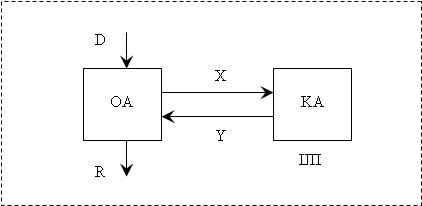
Рис. 1.1 – Загальний алгоритм для обчислювання формули S Схему взаємодії операційного та керуючої частин у цифровому просторі зображено на рисунку 1.2.
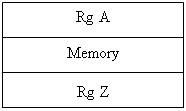
Рис. 1.2 – Структура цифрового пристрою Структурна схема ІМp - моделі зображена на рисунку 1.3
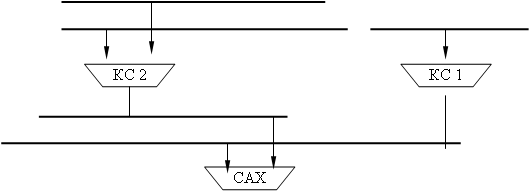
Рис. 1.3 – Структура операційного пристрою Пам’ять автомата складається з регістрів загального призначення R1, ... , Rn. Локальні шини А1, А2, A3 призначені для прийому інформації з пам’яті та передачі її на комбінаційні схеми (КС). В даному випадку використовуються КС двох типів: одномісні та двомісні.
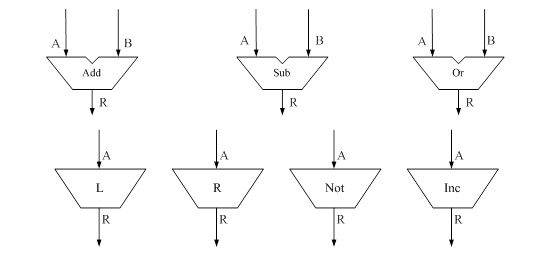
Рис. 1.4 – Приклад комбінаційних схем Однак, у даному ОА використовуються лише деякі з них.
1.2 Розробка функціонального алгоритму Функціональна і структурна організація операційних пристроїв (ОУ) базується на принципі мікро програмного керування, сформульованому в 1951 році М. Уилксом. Відповідно до цього принципу будь-яка машинна операція розділяється на послідовність елементарних дій по обробці інформації – мікро операцій (МО). Порядок проходження мікро операцій визначається спеціальними логічними умовами (ЛУ), що у залежності від значень оброблюваної інформації приймають значення "істина" (1) або "неправда" (0). Алгоритм операцій в ОУ, записаний у термінах мікро операцій і логічних умов, що відбиває порядок проходження мікро операцій у часі, називається мікропрограмою. Функція УА – це оперативна схема алгоритму, операторами якої є символи
Граф-схема алгоритму. Орієнтований зв'язаний граф – граф, що містить одну початкову вершину, одну кінцеву вершину, довільну безліч умовних і операторних вершин. Будова ІМр автомата дозволяє паралельно виконувати одномісну та двумісну операції, тобто можливо виконувати за одне завантаження автомату завантаження двох операнд. Наприклад, у п’ятій вершині зроблено саме так. Кожній дії, завантаженню автомата, відповідає Y[і]. Ідентичні дії відповідають однаковим командам, Y[і]. Логічні умови позначаються – XL, однаковим умовам відповідають однакові XL. Функціональний алгоритм приведений на рисунку 1.5.
Рис. 1.5 – Функціональний алгоритм 1.3 Розробка структурної схеми автомата
1.3.1. Визначення набору регістрів пам’яті: Rg : {RA, RB, RC, RS1, RS2, RS3}
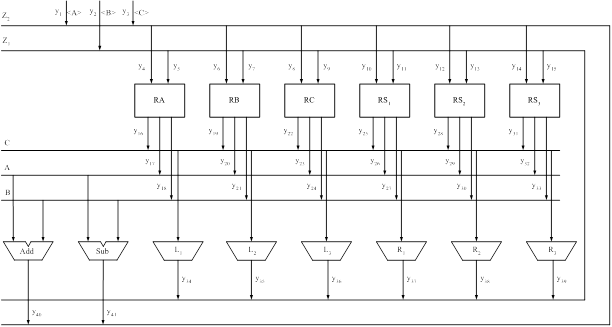
1.3.2. Набір комбінаційних схем: Одномісні: КС1 : {L1, L2, L3, R1, R2, R3} На шину C повинні поступати всі аргументи одномісних операцій. Двомісні: КС2: {Sum, Sub} Припустимо, що операція відіймання виконується наступним чином: Sub := B - A, тому від’ємне завжди повинно знаходитись на шині B, а від’ємник на шині А. В іншій двомісній операції Sum порядок операндів значення не має.
Рис. 1.6 – Структурна схема автомата
1.3.3. Зв'язки між регістрами та локальними шинами Наша схема має три шини: А та B – двомісні, та шина C – одномісна. A {RA, RB, RC, RS1, RS2, RS3} B {RA, RB, RC, RS1, RS2, RS3} C {RA, RB, RC, RS1, RS2, RS3} 1.3.4. Зворотні зв'язки шин Z1 та Z2 з регістрами пам’яті Шини, що є результативними: Z1 – результати одномісних операцій, а Z2 – двомісних операцій. Z1 {RA, RB, RC, RS1, RS2, RS3} Z2 {RA, RB, RC, RS1, RS2, RS3} Кожний елемент, котрий діє у схемі може виконуватись тільки при наявності відповідного керуючого сигналу y[n]. у1, у2, у3 – завантаження початкових даних на шини. у4 – у15 – завантаження даних у регістри пам'яті. у16–у33 – завантаження з пам'яті на локальні шини А, B, C. у34, у39 – завантаження результатів одномісних операцій на шину Z1. y40–у41 – завантаження результатів двомісних операцій на шину Z2. Отримані таким чином дані заносимо до таблиці 1.1 Табл. 1.1 –Таблиця мікрооперацій
Страницы: 1, 2, 3, 4, 5, 6, 7, 8, 9 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||


Copyright © 2012 г.
При использовании материалов - ссылка на сайт обязательна.