 |
|
МЕНЮ
|
Курсовая работа: Разработка цифрового электропривода продольной подачи токарно-винторезного станкаДискретная передаточная функция неизменяемой части представляется Z-преобразованием:
где Неизменяемая часть
включает в себя экстраполятор, формирователь тока якоря, двигатель постоянного
тока и датчик обратной связи, которые описываются передаточными функциями – Передаточная функция формирователя тока описывает соединение двух звеньев, включенных последовательно и образующих единую систему – преобразователь (ТП или ШИП) и якорную цепь двигателя. В результате такого объединения исключается математическое описание преобразователя, который имеет сложную форму выходного напряжения, и математический анализ производится относительно импульсов тока якоря, форма которых проще. При этом передаточная функция формирователя тока приобретает следующий вид:
где
Постоянная времени цепи
якоря
где Учитывая, что передаточная функция якорной цепи введена в передаточную функцию формирователя тока, в структуре двигателя (рисунок 3.2) остается лишь звено, описывающее электромеханическую часть двигателя:
Рисунок 3.2 – Структурная схема двигателя постоянного тока В качестве датчиков скорости применяются устройства, инерционность которых неизмеримо мала по сравнению с периодом дискретности. Поэтому они могут быть представлены пропорциональным звеном с передаточной функцией:
С учетом изложенного передаточная функция приведенной неизменяемой части приобретает вид:
Произведя преобразования, получим:
где
Коэффициент
Для выполнения синтеза цифрового регулятора неизменяемая часть должна быть представлена дискретными функциями. Определим дискретную передаточную функцию (ДПФ) приведенной неизменяемой части:
При
этом следует иметь в виду, что в описании неизменяемой части имеются элементы
запаздывания вида Тогда выражение (3.10) принимает вид:
В
этом выражении 3. Выполнив
Где
Коэффициент
Произведя сокращения, получим ДПФ неизменяемой части привода:
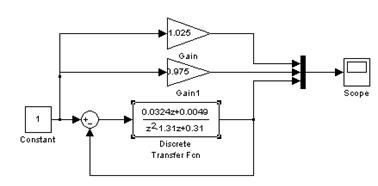
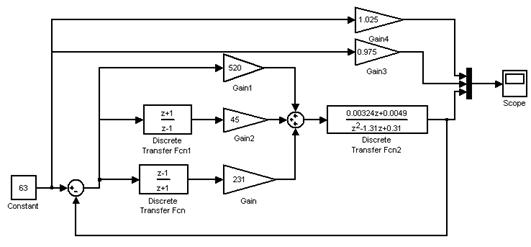
С помощью программного пакета MatLab Simulik можна исследовать поведение САУ ЕП в переходных режимах при налички или отсутствии возбуждающих действий.
Рисунок 3.3 – Структурная схема неизменяемой части двигателя постоянного тока в Simulik
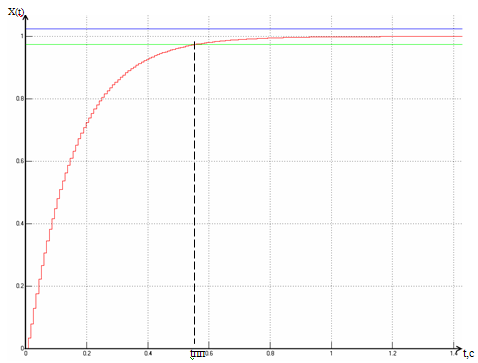
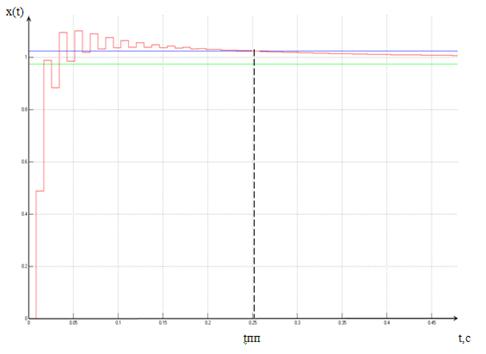
Рисунок 3.3 –График переходного процесса. Как видно из графика время переходного процесса не отвечает заданым критериям, а поэтому необходимо использовать регулятор для улучшения скорости. Определение ДПФ неизменяемой части привода позволяет перейти к синтезу регулятора. Так как синтез регулятора
привода целесообразно проводить в частотной области, то дискретную передаточную
функцию следует преобразовать в дискретную частотную характеристику (ДЧХ) с
помощью билинейного Для перехода к ДЧХ необходимо в выражении (4.22) произвести подстановку:
Таким образом, в результате преобразований дискретная частотная характеристика неизменяемой части электропривода постоянного тока с широтно-импульсным преобразователем и фотоэлектрическим датчиком скорости равна:
Здесь выражение 4. СИНТЕЗ РЕГУЛЯТОРА ПРИВОДА ПОСТОЯННОГО ТОКА При синтезе
параметрического регулятора необходимо желаемую ДЧХ разделить на ДЧХ
неизменяемой части без учета запаздываний Тогда ДЧХ параметрического регулятора определяется соотношением:
В результате сокращения
Для перехода от ДЧХ к ДПФ произведем подстановку:
После этого ДПФ регулятора принимает следующий вид:
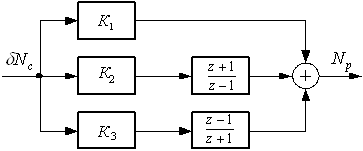
Полученное выражение ДПФ представляет собой сумму передаточных функций пропорционального, интегрирующего и дифференцирующего звеньев, коэффициенты которых равны: − пропорционального звена
− интегрирующего звена
− дифференцирующего звена
где Структурная схема ПИД-регулятора представлена на рисунке 4.1.
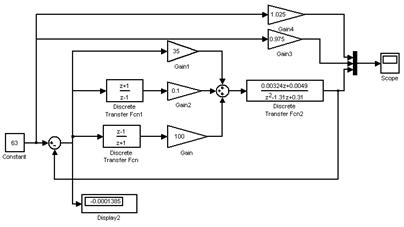
Рисунок 4.1 – Структурная схема цифрового ПИД-регулятора Функциональная модель привода постоянного тока и ПИД регулятора показана на рисунке 4.2.
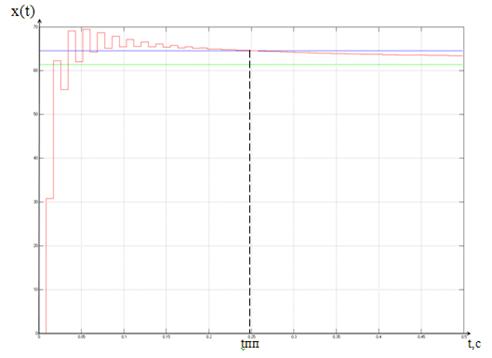
Рисунок 4.2 – Модель системы для оценки ошибки по скорости При рассчитанных коэффициентах ПИД-регулятора данная система имеет переходный процесс, изображенный на рисунке 4.3.
Рисунок 4.3 – График переходной процесса системы с ПИД-регулятором Как видно из рисунка 4.3, разработанная система удовлетворяет требованиям по быстродействию и точности. Время переходного процесса составляет: tпп = 0,08с. Программная реализация регулятора требует преобразования ДПФ в разностную форму. С этой целью ДПФ регулятора приводится к общему знаменателю:
Сгруппировав переменные,
а также умножив числитель и знаменатель на
Применяя обратное z-преобразование, получим разностную форму алгоритма регулятора скорости:
где переменные с индексами 4.2 Моделирование работы привода под нагрузкойМодель системы для определения скоростной ошибки приведена на рис.4.4, а график переходного процесса - на рис. 4.5.
Рисунок 4.4 – Модель системы для оценки ошибки по скорости
Рисунок 4.5 – График переходного процесса при подаче ступенчатого сигнала По результатам моделирования
определяем скоростную ошибку. Из рис. 1 видно, что она составляет Время переходного процесса составляет не меньше 0,22c, что обеспечивает максимальную скорость при допустимом ускорении ( Делаем вывод, что система удовлетворяет заданным показателям. Реакция системы на наброс нагрузкиВведем в систему момент
сопротивления. Для этого из неизменяемой части выделим механическую часть
двигателя
Перед подачей момента сопротивления используем дифференциальное звено с коэффициентом усиления:
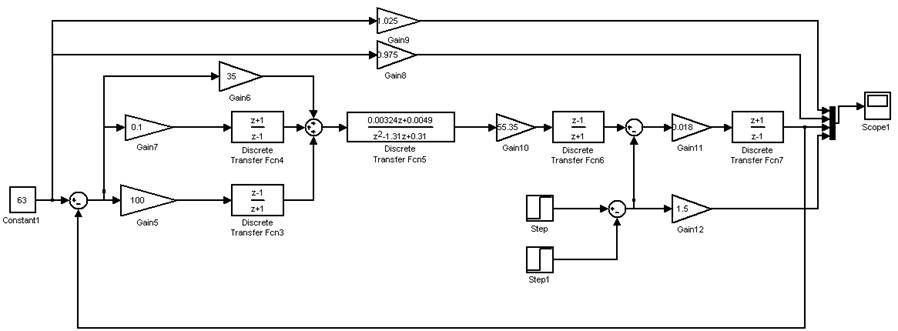
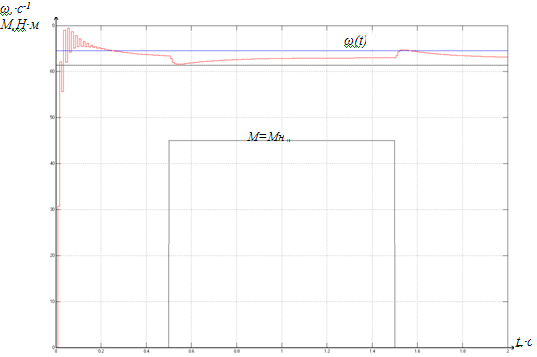
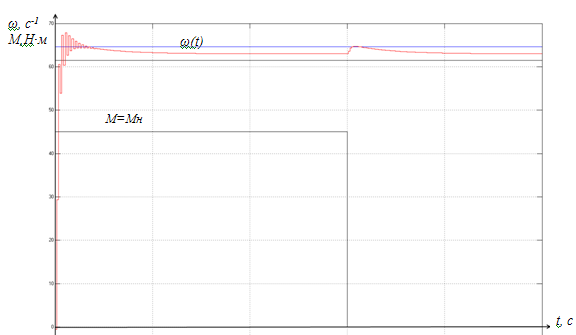
После подачи момента используем интегрирующее звено. В качестве момента сопротивления подадим номинальный момент двигателя. В результате получим модель, показанную на рисунке 4.6. График переходного процесса при набросе и снятии нагрузки показан на рисунке 4.7. Промоделируем ситуацию, когда нагрузка на двигатель будет сразу при его включении (т.е. рабочий инструмент станка изначально нагружен). График такого переходного процесса показан на рисунке 4.8. Промоделируем ситуацию при ступенчатом увеличении значения момента сопротивления от Мн до 2Мн (рисунок 4.9)
Рисунок 4.6 – Модель системы при моделировании подачи момента сопротивления
Рисунок 4.7 – График переходного процесса при набросе и снятии нагрузки
Рисунок 4.8 – График переходного процесса при включении двигателя под нагрузкой
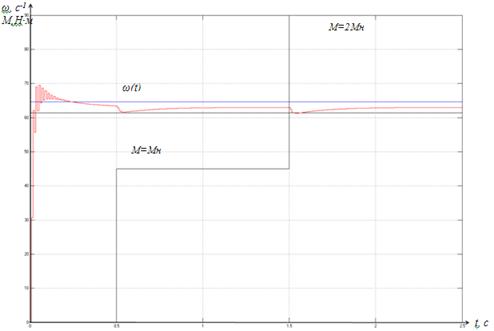
Рисунок 4.9 – График переходного процесса при при ступенчатом увеличении значения момента сопротивления от Мн до 2Мн 5. ПРОЕКТИРОВАНИЕ СРЕДСТВ СОПРЯЖЕНИЯ Проектирование средств сопряжения с объектом связано с определением конкретных величин, от которых зависят точность и быстродействие системы привода. Для проектирования средств сопряжения необходимо, прежде всего, определить период дискретности системы управления. Для электроприводов
постоянного тока с тиристорным преобразователем период дискретности зависит от
частоты сети
где Для электроприводов
постоянного тока с транзисторными ШИП период дискретности зависит от требуемой
точности обработки
В любом случае период дискретности должен удовлетворять условию: T0 <2/λ3. (5.3) В приводах переменного тока с частотными преобразователями для обеспечения требуемого диапазона скорости вращения и, соответственно, частоты питающей сети управление преобразователями осуществляется с дискретностью от 2 до 100 мкс. Квантование по уровню определяет разрядность цифрового представления переменных. Контроль положения рабочего органа осуществляется ротационными или линейными датчиками, характеристики которых приведены в [1]. Для ввода сигналов датчиков в систему управления предусматриваются специальные средства сопряжения, обеспечивающие передачу кодов в требуемом формате. При определении
разрядности кода положения Разрешающая способность
датчика положения или угла поворота – это количество импульсов на выходе
датчика на один шаг измерительной системы. Для поворотных датчиков шагом
измерительной системы является один оборот, что соответствует линейному перемещению
на шаг винта
|
 , (3.3)
, (3.3) – функция длительности импульса напряжения.
– функция длительности импульса напряжения. , (3.4)
, (3.4) . где
. где 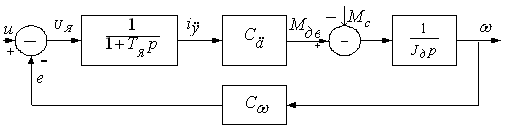
 (3.8)
(3.8) , (3.9)
, (3.9) – коэффициент передачи
неизменяемой части.
– коэффициент передачи
неизменяемой части.
 .(3.11)
.(3.11) . (3.12)
. (3.12) – коэффициент передачи неизменяемой части;
– коэффициент передачи неизменяемой части; . (3.13)
. (3.13) 
 . (3.14)
. (3.14) . (3.15)
. (3.15)
 представляет собой
характеристику запаздывания управляющего воздействия, а
представляет собой
характеристику запаздывания управляющего воздействия, а  является описанием
частотных параметров неизменяемой части привода.
является описанием
частотных параметров неизменяемой части привода. .
. . (4.1)
. (4.1) ДЧХ регулятора принимает
следующий вид:
ДЧХ регулятора принимает
следующий вид: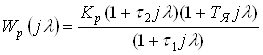 . (4.2)
. (4.2)
 . (4.3)
. (4.3) . (4.5)
. (4.5)
 .
. (4.7)
(4.7) (4.8)
(4.8) (4.9)
(4.9) ,
,  .
.
 ; (4.10)
; (4.10) .
. ; (4.11)
; (4.11) .
.
 (5.1)
(5.1) . (5.2)
. (5.2)
Copyright © 2012 г.
При использовании материалов - ссылка на сайт обязательна.