 |
|
МЕНЮ
|
Курсовая работа: Разработка системы управления механизма передвижения тележкиКурсовая работа: Разработка системы управления механизма передвижения тележкиФедеральное агентство по образованию Государственное образовательное учреждение Высшего профессионального образования Донской Государственный технический университет Кафедра «Робототехника и мехатроника» УТВЕРЖДАЮ Зав. кафедрой.. «______»_____________2008 г. ЗАДАНИЕ на курсовой проект Студент . Группа УМ-41 Тема: «Разработка системы управления механизма передвижения тележки» Срок предоставления проекта к защите «_____»____________2008г. Исходные данные для проектирования: Вариант № 19 Содержание пояснительной записки курсового проекта: ~ Введение. ~ Техническое задание. ~ Расчетно-конструкторская часть. ~ Описание работы системы управления. ~ Заключение. Перечень графических материалов: 1. Система управления ТП. Схема электрическая принципиальная. 2. Переходные процессы. Содержание Введение 1 Техническое задание 2 Расчетно-конструкторская часть 2.1 Расчет статической мощности при передвижении тележки с номинальным грузом 2.2 Выбор двигателя 2.3 Выбор редуктора 2.4 Выбор схемы тиристорного преобразователя 2.5 Выбор силового трансформатора 2.6 Расчет параметров схемы и выбор тиристоров 2.7 Расчет параметров контура нагрузки ТП 2.8 Расчет и построение электромеханических характеристик 2.9 Выбор тахогенератора 2.10 Определение параметров структурной схемы ДПТ 2.11 Динамический расчет системы привода 3 Описание работы системы управления приводом Заключение Список использованных источников Введение Целью данного курсового проекта является разработка мехатронного устройства – тележки мостового крюкового крана. Смысловая её реализации заключается в создании универсальных, надёжных и долговечных устройств, которые тем или иным образом помогали бы человеку решать поставленные перед ним задачи. Для высокоточных производств очень важно иметь хорошую точность позиционирования рабочего органа. Как и любая другая МС состоит из электромеханической системы, которая представляет собой совокупность электродвигательного и преобразовательного устройств, системы управления, механической передачи и рабочего органа, предназначенная для приведения рабочего органа в движение и управление этим движением по заданному алгоритму посредствам микро ЭВМ или микроконтроллера. Свойства электромеханической системы определяются взаимосвязанными характеристиками элементов и образующих её подсистем (механической, электрической и магнитной). Поэтому при этапном проектировании электромеханической системы особое внимание уделяется выбору электромеханической элементной базы, электродвигателей и информационных и силовых полупроводниковых преобразователей, статических и динамических характеристик, как силовых исполнительных элементов, так и системы управления при исследовании качества регулирования электромеханической системы с использованием микроконтроллеров или ЭВМ. Целью управления может быть решение двух обобщенных задач – поддержание некоторых параметров в определенных диапазонах и регулирование значений выходных переменных по требуемому закону. В каждой из этих задач управляющей системе требуется сформировать выходное воздействие, реализация которого компенсирует образовавшуюся ошибку управления. 1 Техническое задание Разработать систему управления механизмом передвижения тележки мостового крюкового крана (мехатронного объекта) с техническими характеристиками:
Рисунок 1.1 –Тележка мостового крюкового крана 2 Расчетно-конструкторская часть 2.1 Определим статическую мощность при передвижении тележки с номинальным грузом
где G – сила тяжести перемещаемого груза, Н;
g – ускорение свободного падения, м/с2; G0 – сила тяжести самого механизма передвижения, Н; v – скорость передвижения, v=0,53 м/с; Rk – радиус ходового колеса с цилиндрическим ободом, м; d – диаметр шейки оси ходового колеса, d=0,058 м; k – коэффициент, учитывающий увеличение сопротивления движению из-за трения реборд ходовых колес о рельсы, k=2,0. μ – коэффициент трения скольжения в подшипниках опор вала ходового колеса, μ=0,02 для подшипников качения; η – КПД механизма передвижения f – коэффициент трения качения ходовых колес по рельсам, f=0.0004 м.
Определяем предварительную номинальную мощность электродвигателя
где kt – коэффициент, зависящий от номинального режима работы, kt=1,15 для тяжелого режима;
2.2 Выбор двигателя Предварительный выбор двигателя производят по результатам расчета номинальной мощности. Окончательно требуется выбрать только один из четырех двигателей. Для этого необходимо построить энергетические характеристики каждого, а затем (по необходимым условиям и параметрам) выбрать соответствующий тип. Таблица 2.1– Номинальные параметры выбранных двигателей
Для построения энергетической характеристики каждого двигателя необходимо рассчитать следующие параметры: · Номинальную угловую скорость двигателя:
где n – номинальная частота вращения двигателя.
· Номинальный вращающий момент двигателя:
Так как двигатель постоянного тока
допускается перегружать по току в Построение характеристик выполняется в координатах Ω(М),Рэнерг(М)
Рисунок 2.1 – Энергетические характеристики выбранных двигателей o Требуемый момент
o Требуемая угловая скорость
Расчет ориентировочного значения передаточного числа редуктора
Определение ожидаемой линейной скорости на выходе редуктора с ориентировочным передаточным числом
|

 Н·м. (2.5)
Н·м. (2.5) Н·м.
Н·м.  Н·м.
Н·м. Н·м.
Н·м.  Н·м.
Н·м.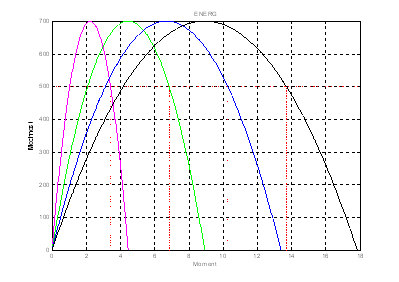
 рад/с, (2.7)
рад/с, (2.7) рад/с.
рад/с. , (2.8)
, (2.8) ,
,  ,
, ,
,  м/с, (2.9)
м/с, (2.9) м/с.
м/с.
Copyright © 2012 г.
При использовании материалов - ссылка на сайт обязательна.