 |
|
МЕНЮ
|
Дипломная работа: Проектирование диспетчерского центра котельных установокСуществует два вида плат: а. Аналогового в/в б. Дискретного в/в Рассмотрим данные виды плат поподробнее. а. Плата аналогового ввода-вывода
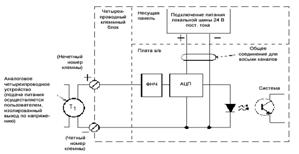
Рис. 2.2.2 Характеристики платы аналогового ввода Основные параметры и характеристики представлены в рисунке 2.2.2 На рисунке 2.2.3 представлена схема 8-канального аналогового ввода
Рис. 2.2.3 схема 8-канального аналогового ввода б. Плата дискретного ввода-вывода
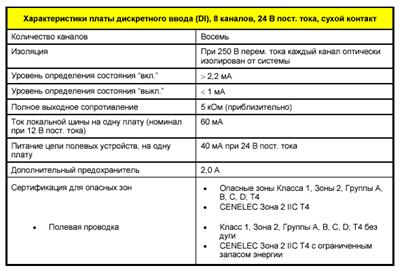
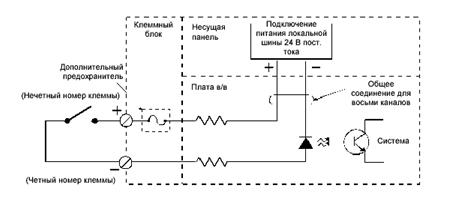
Рис. 2.2.4 Характеристики платы дискретного ввода Основные параметры и характеристики представлены в таблице 2.2.4. На рисунке 2.2.5 представлена схема 8-канального дискретного ввода
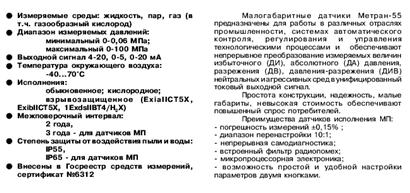
Рис. 2.2.5 схема 8-канального дискретного ввода Возможна поставка различных клеммных блоков в/в, соответствующих конкретным функциональным требованиям и внешним условиям. Используемые вместе клеммные блоки и платы в/в снабжены ключами функциональной и электрической защиты, которые гарантируют, что только работающие вместе плата и клеммный блок могут подключаться друг к другу. Клеммные блоки могут для ускорения монтажа системы устанавливаться и подключаться отдельно от плат. Для тех полевых устройств, которые расположены во взрывобезопасных зонах, или для дискретных полевых устройств, которым требуется больший ток, чем максимальный выдерживаемый платой, предоставляется групповой клеммный блок с 10, 16 или 24-контактами для соединения с промежуточными панелями. Низкоуровневые сигналы проводятся по ленточному кабелю 0,093 мм2 (28 по AWG . Американскому сортаменту проводов) или круглому измерительному кабелю. Для полевых устройств, требующих внешнего питания, может поставляться клеммный блок в/в, предназначенный для 4-проводных устройств. Такой клеммный блок в/в используется вместе с платой аналогового ввода 4-20 мА. В нашем случае производится заказ специальной платы поддерживающей протокол MLink. 2.3 Выбор и описание датчиков В данной котельной установке используется несколько типов датчиков. Рассмотрим подробнее каждый из них а. Датчик давления Датчики производства фирмы «Метран» Метран-55 Рассмотрим основные характеристики и параметры датчика
Рис. 2.3.2 Характеристики и параметры датчика б. Датчик температуры В данном случае используется два вида датчиков температур.
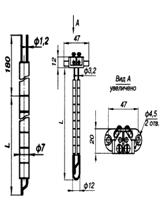
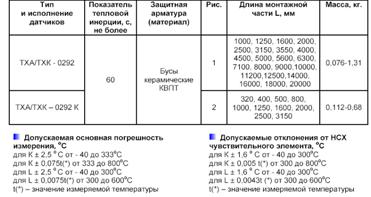
Рис. 2.3.3 Рис 2.3.4 Первый тип датчиков (рис. 2.3.3) необходим для вмонтирования в материал, в нашем случае в печь. Основные характеристики представлены на рисунке 2.3.5
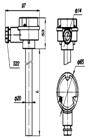
Рис. 2.3.5 Основные характеристики датчика TXA/TXK-0292 Второй вид датчиков (рис. 2.3.4) необходим для монтажа в трубыОсновные характеристики представлены на рисунке 2.3.6
Рис. 2.3.6 Основные характеристики датчика TXA/TXK-0192 2.4 Синтез системы управления котельной установкой По заданной функциональной схеме составим структурные схемы исходной системы. Определим передаточные функции звеньев. Таблица 2.1 Определение передаточной функции звеньев
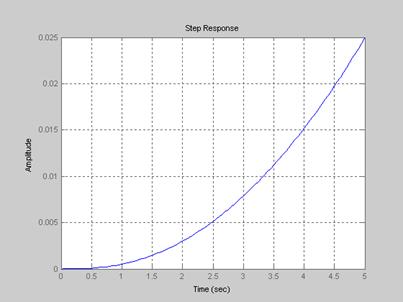
WИСХ = Wз*Wк = Проверим исходную систему на устойчивость, т. е. получим график переходного процесса (рис. 2.4.1):
Рис. 2.4.1 Из рисунка видно, что переходный процесс является расходящимся, следовательно исходная система неустойчива и требует регулирования. Первый контур регулирования
Рис.2.4.2 КТ = 0.08/8 = 0.01 ,(2.2) Найдем исходную ПФ 1 контура WИСХ1(p)= Wз*Wк *КТ, (2.3) WИСХ1(р) = Будем настраивать внутренний контур на технический оптимум. При настройке на технический оптимум желаемая передаточная функция имеет вид Wж1(р)= С другой стороны WЖ1 (р)= Wрег1(р)* Wисх1(р), следовательно Wрег1(р)= Wрег1(р)= Выполним проверку. Найдем желаемую ПФ замкнутой системы
Найдем ПФ замкнутого первого контура Ф1(S)= Для дальнейших расчетов примем Ф1(S) ≈ Расчеты выполнены верно: Ф1(S) = ФЖ1 (S). Найдем ПФ замкнутой и разомкнутой системы Wраз=Ф3*
Проверим систему на устойчивость, т. е. получим график переходного процесса (рис.2.4.3):
Рис. 2.4.3 Из рисунка видно, что время переходного процесса равно 0.8 сек, следовательно рассчитанный регулятор подходит для данной системы и система является устойчивой. 2.5 Реализация корректирующих устройств на регуляторах МЕТОДИКА СИНТЕЗА ЦИФРОВОГО РЕГУЛЯТОРА В связи с тем, что контроллер, используемый в системе управления ТП, работает дискретно, то и регуляторы должны быть представлены в дискретном виде (аппроксимация Тустена или Z - преобразования ). Существуют различные методы синтеза цифровых регуляторов, основанные на теории Z - преобразования и пространства состояний. Эти методы требуют очень громоздких математических преобразований и используются в особо точных системах управления. Рассмотрим более простой подход, состоящий в предварительном синтезе непрерывных регуляторов известными методами теории автоматического регулирования для непрерывных систем и последующем переходе к цифровому регулятору, эквивалентному синтезированному аналоговому. Задача переоборудования аналоговых регуляторов решается как задача аппроксимации передаточной функции данного регулятора дискретной передаточной функцией цифрового регулятора. В инженерной практике наибольшее применение нашла аппроксимация, полученная на основе билинейного преобразования или аппроксимация Тустена. Согласно этой аппроксимации
где Т - интервал дискретизации по времени Однако, этим методом можно пользоваться только тогда, когда интервал дискретизации по времени для цифровой системы Т мал по сравнению с самой малой постоянной времени системы управления Тm. Согласно теореме Котельникова - Шеннона непрерывный сигнал достаточно точно восстанавливается по совокупности его дискретных значений, если Т £ 0,5 Тm.. (2.14) На практике рекомендуется иметь больший коэффициент запасаТ £ ( 0,1 - 0,2 ) Тm.(2.15) Определим период дискретизации (Т): это обратная величина от частоты контроллера, но лучше взять частоту АЦП, которая в нашем случае равна 48КГц=48000Гц. Выбор частоты АЦП связан с тем, что скорость обработки информации в первую очередь зависит от скорости работы АЦП.
Проверим соблюдение условия (теорема Котельникова - Шеннона) Т £ 0,5 Тm.. (2.17) 0.00001 £ 0,5*0.02, (2.18) 0.00001 £ 0.01, (2.19) Условие соблюдается, следовательно период дискретизации выбран правильно. Произведем перевод полученных регуляторов в дискретные. Синтез цифровых регуляторов по средствам программы MatLab Wрег1(р) = Wрег1(z) = 3. Создание диспетчерского центра В настоящее время в поселке Варламово в эксплуатации находятся две котельные установки и еще одна готовится к пуску в этом году. Такое количество полностью перекрывает нужду населения и учреждений. В данной дипломной работе мы рассмотрим создание единого диспетчерского центра для котельных установок. Создание такого центра обусловлено техническим заданием руководства УЖКХ, для того чтобы иметь постоянный контроль за процессом работы котельных установок в режиме реального времени. Диспетчерский центр должен находиться в здании УЖКХ п. Варламово. 3.1 Аппаратная часть В состав аппаратной части входи входят: а. Компьютер б. сетевая карта в. модем Рассмотрим каждый пункт подробнее. а. Компьютер Компьютер для диспетчерского центра должен иметь следующие характеристики: - процессор; Должен иметь большие характеристики по производительности, т.к. он должен будет обрабатывать данные поступающие с котельных станций, а также вести архивирование и резервное копирование всех данных и параметров. В данном случае мы остановились на процессоре фирмы Intel Pentium 4 (2.66 ГГц, Socket-755). - материнская плата; Должна подходить по параметрам взаимодействия с процессором, а также иметь встроенный сетевой контроллер. В данном случае мы остановились на материнской плате фирмы ASUSTeK P5GD1 PRO - Оперативная память; Должна по подходить по параметрам взаимодействия с материнской платой. Объем оперативной памяти должен составлять не менее 1 Гб. В данном случае мы остановились на оперативной памяти фирмы Kingston (DIMM 512 DDR SDRAM PC3200). Приобретаем две панели. - Жесткий диск; Должен иметь достаточно большое дисковое пространство для хранения отчетов, архивов и резервных копий. В данном случае мы остановились на жестком диске фирмы Seagate (HDD 120 Гб, SATA). - Видеокарта Должна иметь средние характеристики по производительности. В данном случае мы остановились на видеокарте фирмы MicroStar MS-8940 120 Мб. - Корпус; Должен иметь блок питания не менее 400 Вт. В данном случае мы остановились на корпусе фирмы Foxconn TPS-538 400W. - Устройства ввода; Клавиатура и мышь выбираются любые и не должны соответствовать каким либо специальным параметрам. В данном случае мы остановились на клавиатуре и мышке фирмы Genius. - Монитор; Должен иметь диагональ не менее 17 дюймов и высокое качество изображения, т.к. оператор 12 часов проводит за свои рабочим местом. В данном случае мы остановились на мониторе фирмы Samsung SyncMaster 797MB. - Колонки; Необходимы для вывода звуковой информации. В данном случае мы остановились на колонках фирмы Genius Mini SP-Q06. - Привод DVD+/-RW; Необходим для записи информации для длительного хранения. В данном случае мы остановились на приводе фирмы Nec ND-4550A. б. Сетевая карта В нашем случае это сетевая карта фирмы D-Link DFE 550 TX 10/100. Необходимо приобрести две сетевых карты. Т.к. наша система будет работать на скорости 100 Мб/с то оборудование выбирается в соотношении характеристики-цена. Данная сетевая карта является одной из наиболее приемлемых моделей. в. Модем Для взаимодействия по протоколу MLink нам необходим VDSL-модем, который обеспечивает высокую скорость передачи данных. Необходимо приобрести 3 модема, по модему на каждую станцию. Таким образом, соединение компьютера с контроллером происходит удаленно по медным проводам через модем. Для устойчивой работы необходимо также создать «выделенный» канал связи. Он создается на АТС. 3.2 Программное обеспечение Программное обеспечение поставляется вместе с контроллерами DeltaV. Рассмотрим этот программный продукт подробнее. Для нашей системы выбираем пакет ПО «Профессиональный плюс» Каждая система DeltaV имеет одну и только одну рабочую станцию с пакетом программного обеспечения «Профессиональный ПЛЮС». Эта рабочая станция поддерживает глобальную базу данных конфигураций системы, а также обеспечивает конфигурирование системы. Таким образом, пакет ПО «Профессиональный ПЛЮС» является основным интерфейсом системы, предназначенным для решения инженерных и конфигурационных задач. Для небольших систем DeltaV данный пакет может служить также как интерфейс для операторского управления и диагностики. Таблица 3.1 содержит описание станции Профессиональной ПЛЮС. Таблица 3.1
Система DeltaV поддерживает три языка управления, так что всегда можно выбрать наиболее подходящий язык для конкретной задачи. Можно использовать Диаграммы функциональных блоков (ДФБ), Диаграммы функциональных последовательностей (ДФП) и структурированный текст (СТ), что делает разработку стратегии управления интуитивно понятной и простой. Функциональность лицензии "Сбор данных" включена в базовую функциональность ПО "Профессиональное ПЛЮС". Пример: Если заказывается лицензия "Профессиональная ПЛЮС" на 1000 ТПУ и "Управление" на 200 ТПУ, то 800 ТПУ можно использовать для контроля (регистрации данных, мониторинга). В модулях, которые выполняют только функции мониторинга, можно использовать перечисленные ниже функциональные блоки. Применение других функциональных блоков в модуле или использование параметров, ссылающихся на модули только для мониторинга, приведет к тому, что все ТПУ этого модуля будут рассматриваться как ТПУ для управления. Функции расширенного управления, входящие в ПО Нечеткая логика, Автонастройщик и Нейро DeltaV, а также в ПО сторонних производителей для управления с прогнозированием по модели, лицензируются отдельно и не включаются в перечисленные выше категории лицензий (за более подробной информацией обратитесь к техническим проспектам по соответствующим разработкам для расширенного управления). Страницы: 1, 2, 3, 4, 5, 6, 7, 8 |
||||||||||||||||||




 (2.5)
(2.5) (2.6)
(2.6) (2.8)
(2.8) =
=  , (2.11)
, (2.11)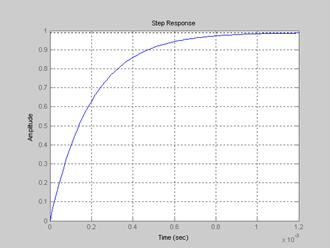
 ;
;
Copyright © 2012 г.
При использовании материалов - ссылка на сайт обязательна.