 |
|
МЕНЮ
|
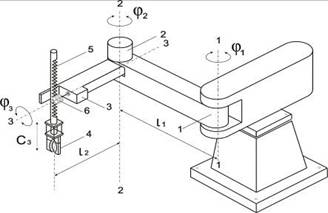
Курсовая работа: Проектирование управляемого привода в электромеханических системахКурсовая работа: Проектирование управляемого привода в электромеханических системахПОЯСНИТЕЛЬНАЯ ЗАПИСКА Тема: "Проектирование управляемого привода в электромеханических системах" Техническое задание на проектирование управляемого электропривода 1. Конструктивная схема (рис. 1) промышленного робота (ПР) с грузоподъемностью от 10 до 30 кг, используемого в сборочных операциях в автомобильной промышленности. ПР – автоматическая стационарная машина, имеющая исполнительный механизм (манипулятор) с тремя степенями подвижности. Два механизма поворота, расположенные в шарнирах 1 и 2, осуществляют программные повороты j1(t), j2(t) вокруг вертикальных осей (1–1 и 2–2 соответственно), механизм подъема 3 осуществляет поступательное перемещение С3(t) объекта манипулирования, зажатого в захватывающем механизме 4. В механизме подъема 3 использована зубчато-реечная передача с зубчатой рейкой 5 и зубчатой шестерней 6.
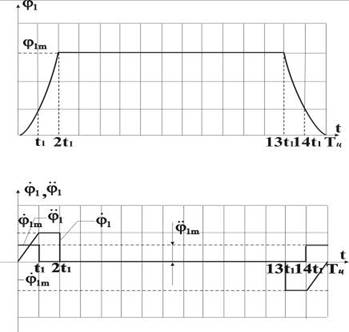
Рис. 1. Конструктивная схема промышленного робота 2. Перемещения по степеням подвижности осуществляются последовательно, начиная с перемещения j1(t). 3. Силовой модуль первого из индивидуальных приводов промышленного робота (рисунок 1) сосредоточен в центре масс шарнира 1. Центр тяжести груза (объекта манипулирования) совпадает с центром приведения масс захватывающего механизма 4. 4. Для данного ТЗ управляемый привод по координате j1(t) – программный, типа «угол – угол». 5. Описание и параметры программных траекторий рабочих циклов исследуемого привода приведены на рисунках 2 и 3.
Рис. 2. Первая из двух возможных траекторий рабочего цикла для первого привода
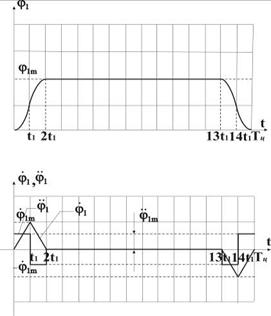
Рис. 3. Вторая из двух возможных траекторий рабочего цикла для первого привода
6. Масса зубчатой рейки mp = 5 кг, минимальное mmin = 15,5 кг и максимальное mmax= 25 кг значения массы груза вместе с массой захватывающего механизма. 7. Длина звеньев манипулятора l1= 0,5 м и l2 = 0,5 м (рис. 1). 8. Массы звеньев m1 = 54 кг и m2 = 4 кг. 9. Расстояние от центров масс звеньев до соответствующих шарниров r1 = 0,25 м и r2 = 0,25 м. 10. Динамические моменты инерции J1 = 0,3 кг.м2 и J2= 0,25 кг.м2 первого и второго звеньев относительно вертикальных осей, проходящих через их центры масс. Максимальный J3max = 0,3 кг.м2 и минимальный J3min= 0,15 кг.м2 динамические моменты инерции третьего звена: зубчатой рейки с захватывающим механизмом и грузом. 11. Коэффициент вязкого трения Квт = 0,04. 12. Момент сухого трения Мо = 0,05 Н.м. 13. КПД редуктора h = 0,65. 14. Передаточное отношение зубчато-реечной передачи iрп. 15. Параметры усилителя мощности kу = 220, Tm = 0,0015 с. 16. Статическая ecт = 1,0% и динамическая eд = 0,9% допустимые погрешности привода. 17. Прямые показатели качества: перерегулирование s = 25% и время переходного процесса tпп = 1,5 c. Управляемый электропривод получил широкое применение во всех сферах жизни и деятельности общества от промышленного производства до бытовой техники. Широта применения определяет исключительно большой диапазон мощностей электроприводов и значительное разнообразие их исполнения. В управляемом электроприводе нашли применение и получили развитие основные достижения современной техники управления. В ходе выполнения курсовой работы необходимо разработать конкретный электропривод, программно управляющий угловым перемещением промышленного робота-манипулятора по одной из трех степеней подвижности. Для наглядности корректности функционирования синтезированного управляемого электропривода выполнение работы включает построение его цифровой модели и оценку ее качественных показателей, используя средства компьютерного моделирования. 1 Энергетический расчет привода 1.1 Определение заданных программных траекторийОпределим постоянную времени
Приведем максимально возможное значение угловой координаты перемещаемой нагрузки к размерности [рад].
Рассчитаем неопределенные параметры для первой возможной траектории движения рабочей нагрузки за время одного цикла работы двигателя. Таблица 1.1
Для нахождения параметров траектории решим систему уравнений (1.3), приравняв значения угла поворота и скорости нагрузки в общих для сопряженных участках точках.
Из второго уравнения системы (1.3) получим зависимость для параметра b и подставим его в первое выражение.
Получим численные значения параметров a и b.
По формуле 1.5 найдем параметры a и b:
Таблица 1.2
Максимальные значения: а) угла поворота нагрузки 1m(t) = 2.443 рад, б) угловой скорости нагрузки p1m(t) = 1.2215 рад/c-1, в) углового ускорения нагрузки p21m(t) = 0.916 рад/c-2. Рассчитаем неопределенные параметры для второй возможной траектории движения рабочей нагрузки за время одного цикла работы двигателя. Таблица 1.3
|
 . (1.3)
. (1.3)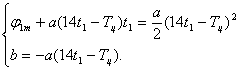 . (1.4)
. (1.4) (1.5)
(1.5)
Copyright © 2012 г.
При использовании материалов - ссылка на сайт обязательна.