 |
|
МЕНЮ
|
Дипломная работа: Мікропроцесорна метеостанціяДипломная работа: Мікропроцесорна метеостанціяМіністерство освіти і науки України Вінницький національний технічний університет Інститут автоматики, електроніки та комп’ютерних систем управління Факультет автоматики та комп’ютерних систем управління Кафедра метрології та промислової автоматикиКУРСОВИЙ ПРОЕКТз дисципліни “Інформаційно-вимірювальні системи” МІКРОПРОЦЕСОРНА МЕТЕОСТАНЦІЯ Керівник Кулаков П. І. Студент гр. 1АМ-01 Балтак К. В. Вінниця 2006 Зміст Анотація Вступ 1. Техніко-економічне обґрунтування доцільності розробки 2. Обґрунтування і розробка структурної схеми приладу 3. Розробка електричної принципової схеми мікропроцесорної метеостанції 3.1 Вибір мікро контролера 3.2 Вибір перетворювача рівня сигналу 3.3 Аналого-цифровий перетворювач АD1674 3.4 Датчик відносної вологості Модель RL-1HS100 3.5 Датчик атмосферного тиску. Модель RL1APS115 3.6 Датчик температури. Модель LM94021 3.7 Розробка електричної принципової схеми мікропроцесорної метеостанції 4. Електричні розрахунки найголовніших вузлів електричної принципової схеми 5. Алгоритмічне забезпечення 6. Метрологічні характеристики Висновки Література Додатки Додаток А (обов’язковий). Мікропроцесорна метеостанція. Перелік елементів Анотація В даному курсовому проекті спроектована мікропроцесорна метеостанція її електрична, структурна схема. В проекті проводяться розрахунки основних елементів електричної принципової схеми. В додатках наведена електрична принципова схема приладу та перелік всіх її елементів. ВступІнформаційно-вимірювальні системи – це сукупність апаратних, програмних та інших засобів, призначених для отримання і обробки вимірювальної інформації, керування потоками інформації, її перетворення та представлення у необхідному для користувача вигляді. Інформаційно-вимірювальні системи, як правило, входить до складу системи автоматичного керування процесом і не здійснює керування процесом. Задачі керування покладені на системи автоматичного керування. Інформаційно-вимірювальні системи поділяються на чотири групи: - вимірювальні системи – це системи, призначені для отримання, обробки та представлення у необхідному вигляді вимірювальної інформації; - системи технічної діагностики – такі системи, які призначені для знаходження місця і причини виникнення несправності об’єкту; - системи розпізнавання образів – такі системи, які встановлюють належність об’єкту до заданого класу; - системи контролю – системи, які визначають відповідає об’єкт заданим нормам чи не відповідає. В даному курсовому проекті проведено загальний огляд можливих реалізацій структурних схем мікропроцесорної метеостанція, визначено їх основні характеристики та недоліки. З трьох схем обрано ту, яка більше підходила встановленим вимогам. На основі обраної структурної схеми розроблена електрична принципова схема приладу. 1. Техніко-економічне обґрунтування доцільності розробки В даному курсовому проекті розробляється структурна схема мікропроцесорної метеостанція. Розглянемо для порівняння три варіанта структурних схем, коротко охарактеризуємо і розглянемо основні характеристики роботи система та оберемо основну структурну схему, з якою будемо працювати і надалі. Для вибору однієї із наведених нижче структурних схем, важливим елементом являється те, що користувач хоче отримати в результаті від системи, тобто який параметр буде найбільш важливим для роботи . Розглянемо першу структурну схему, яка приведена на рисунку 1.
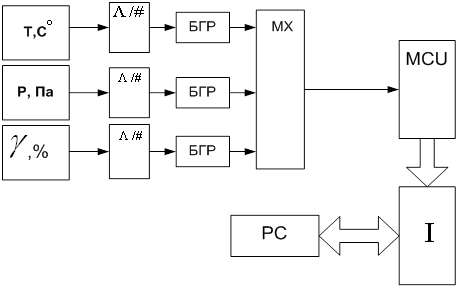
Рисунок 1 – Перший варіант структурної схеми. Умовні
позначення: Принцип дії полягає в наступному: Три датчика вимірюють свої фізичні величини. На виході яких після вимірювання утворюється аналогова величина, яка подається на відповідний АЦП. Яка перетворює аналогову величину в цифровий код. Після цього цей код проходить через гальванічну розв’язку, мультиплексор і поступає на мікроконтролер. А потім через інтерфейс на ПК. Таким чином, структурна схема № 2 матиме наступний вигляд.
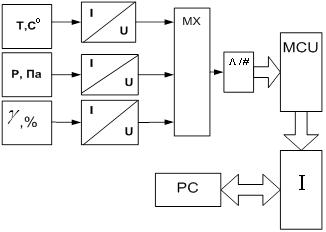
Рисунок 1.1 – Другий варіант
структурної схеми. Умовні позначення: Принцип дії полягає в наступному: Три датчика вимірюють свої фізичні величини. На виході яких після вимірювання утворюється аналогова величина, яка подається на перетворювач роду величини. Після цього цей код проходить через мультиплексор і поступає на АЦП. Який перетворює аналогову величину в цифровий код. А потім через мікроконтролер, інтерфейс на ПК. Таким чином, структурна схема № 3 матиме наступний вигляд
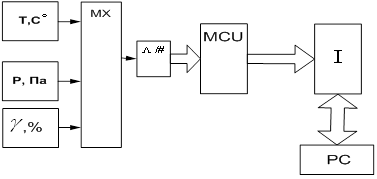
Рисунок 1.2 – Третій варіант
структурної схеми. Умовні позначення: Принцип роботи схожий з принципом роботи попередніх схем. Три датчика вимірюють свої фізичні величини. На виході яких після вимірювання утворюється аналогова величина, яка подається через мультирлексор на АЦП. Яка перетворює аналогову величину в цифровий код. Після цього цей код проходить на мікроконтролер. А потім через інтерфейс на ПК. Так як дана система буде використовуватись у високоточних експериментах, то найбільш важливим параметром являється точність виміряних показань та простота реалізації вимірювальної системи. Для того, щоб порівняти наведені структурні схеми, якій перерахуємо основні параметри системи. Для цього побудуємо таблицю 1. Таблиця 1 – Порівняння структурних схем
Обчислимо узагальнений коефіцієнт якості, який знаходиться за наступною формулою:
Узагальнений критерій якості першої схеми:
Узагальнений критерій якості другої схеми:
Узагальнений критерій якості третьої схеми:
Як бачимо, критерій якості третьої схеми більший, ніж для інших структурних схем. Виходячи з цих розрахунків можна зробити висновок, що для поставленої нами задачі більше підходить структурна схема, представлена на рисунку 1.2. Отже, ми запропонували оптимальний варіант структурної. Використаємо цю схему для побудови електричної принципової схеми системи, що розробляється. [1] 2. Обґрунтування і розробка структурної схеми приладу Підхід до вибору блоків, з яких складається структурна схема здійснювався на основі сучасних, модернізованих та ефективних мікроелектронних компонентів.
Рисунок 2 – структурна схема Структурна схема представлена на рисунку 2 , за рішенням першого пункту є актуальна і складається з таких блоків:
Блок 1,2,3 - датчик температури, призначений для вимірювання температури повітря - датчик тиску, призначений для вимірювання тиску повітря - датчик вологості, призначений для вимірювання вологості повітря
Блок 4, 5 - мультиплексор, призначений для керування потоками даних для вибору каналу за якими проводиться вимірювання та інших задач пов’язаних с керуванням потоками інформації. - АЦП, призначений для перетворення відхідної безперервної величини в якій міститься вимірювальна інформація у цифровий код, який теж містить цю інформацію.
Блок 6 -Мікроконтролер, призначений для обробки вимірювальної інформації, яка переставлена у цифровому вигляді, керування потоками інформації, забезпечення обміну даними між окремими частинами ІВС та зовнішніми пристроями.
Блок 7 - Інтерфейс, призначений для обміну даними між зовнішніми пристроями.
Блок 8 - Персональний комп’ютер . Три датчика вимірюють свої фізичні величини. На виході яких після вимірювання утворюється аналогова величина, яка подається через мультирлексор на АЦП. Який перетворює аналогову величину в цифровий код. Після цього цей код поступає на мікроконтролер. А потім через інтерфейс на ПК.[2] 3. Розробка електричної принципової схеми мікропроцесорної метеостанції 3.1 Вибір мікро контролераДля реалізації задач дипломного проекту використовується 8-розрядний мікроконтролер фірми Atmel серії AT90S8515. КМОН мікроконтролери AT90S8515 реалізовані по AVR RISC архітектурі (Гарвардська архітектура з роздільною пам'яттю і роздільними шинами для пам'яті програм і даних). Виконуючи команди за один тактовий цикл, прилади забезпечують продуктивність, що наближається до 1 MIPS/МГЦ. AVR ядро об'єднує потужну систему команд з 32 8-розрядними регістрами загального призначення і конвеєрне звернення до пам'яті програм. Шість з 32 регістрів можуть використовуватися як три 16-розрядних регістра-покажчика при побічній адресації простору пам'яті. Виконання відносних переходів і команд виклику реалізується з прямою адресацією всього обсягу (4К) адресного простору. Адреси периферійних функцій містяться в просторі пам'яті вводу/виводу. Архітектура ефективно підтримує як мови високого рівня, так і програми на мовах асемблера. Мікроконтролери містять: 4 Кбайт програмованого Flash, 128 байт СОЗП і 256 байт програмованого ЕСППЗП, 20 ліній вводу/виводу загального призначення, 32 регістри загального призначення, два таймера/лічильника з режимом захоплення і порівняння, 6-канальний 10-розрядний аналого-цифровий перетворювач, систему внутрішніх і зовнішніх переривань, програмований послідовний UART, програмований сторожовий таймер з внутрішнім генератором, послідовний порт з інтерфейсом SPI. Програмно управляються два режими енергозбереження. В пасивному режимі (idle) ЦПУ зупиняється, але СОЗУ, таймери/лічильники, порт SPI, сторожовий, таймер і система переривань залишаються активними. В стоповому режимі (power down) зупиняється тактовий генератор і, отже зупиняються всі функції, доки не надійде сигнал зовнішнього переривання або апаратного скидання, але зберігається вміст регістрів. Вбудована Flash пам'ять програм може перепрограмовуватися безпосередньо в системі шляхом інтерфейсу SPI (в послідовному низьковольтному режимі) або програмуватися стандартними програматорами енергонезалежної пам'яті (в 12-вольтовому паралельному режимі). Максимальне споживання приладів в активному режимі складає 3.0 мА і в пасивному режимі 1.2 мА (при VCC =3 В і f = 4 МГЦ). В стоповому режимі, при працюючому сторожовому таймері, мікроконтролер споживає 15 мкА. Об'єднання на одному кристалі вдосконаленого 8-розрядного RISC ЦПУ з Flash ПЗУ, яка завантажується дозволило фірмі створити потужний мікроконтролер, що забезпечує високу гнучкість і економічність в використанні приладу в якості вбудованого контролера. |
 . (1.1)
. (1.1)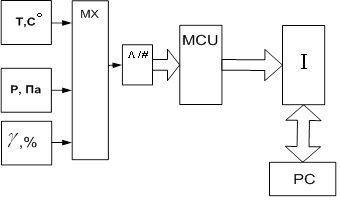




Copyright © 2012 г.
При использовании материалов - ссылка на сайт обязательна.